Gazebo Apply Command
Send command to Gazebo simulator

Libraries:
Robotics System Toolbox /
Gazebo Co-Simulation
Description
The Apply Command block sends commands to a Gazebo simulation. The block accepts a command message, input as a bus signal, and sends the command to the Gazebo server.
To send command messages, connect to a Gazebo simulation. Open the block mask and click Configure Gazebo network and simulation settings. For more information see Configure Gazebo Simulation.
This block is part of a co-simulation interface between MATLAB® and Gazebo for exchanging data and sending commands. To see a basic example, check Perform Co-Simulation Between Simulink and Gazebo.
Examples

Perform Co-Simulation Between Simulink and Gazebo
Set up a synchronized simulation between Simulink® and Gazebo to send commands and receive data from Gazebo.

Control Differential Drive Robot in Gazebo with Simulink
Control the Pioneer differential drive robot in Gazebo co-simulation using Simulink.
Limitations
Models that use this block do not support Code Generation or Rapid Accelerator mode.
Ports
Input
Parameters
More About
Click Configure Gazebo network and simulation settings
in the block mask to launch the Configure Gazebo
Simulation dialog box, which configures the
synchronized stepping between Gazebo and Simulink. You can select the Network Address
and specify Hostname/IP Address and
Port of the computer running the Gazebo
simulator with the Gazebo plugin installed. Then click
Test to test the connection to the
running Gazebo simulator. You can also specify the Response
timeout in seconds. These settings apply to all
Gazebo blocks for all open Simulink models.
Starting from R2022b, you can connect to multiple Gazebo simulations from one or more machines. You can now specify a cell array of IP addresses and a cell array of port numbers in the MATLAB workspace and then specify their variable names to the Hostname/IP Address and Port boxes, respectively.
To connect to a single Gazebo session from MATLAB, specify the port number and IP address of the computer running the Gazebo simulator.
portnum = 14580;
ipaddress = '172.18.250.125'; To connect to multiple Gazebo sessions from MATLAB, specify the port numbers and IP addresses of the computers running the Gazebo simulator.
portnum = {14580,14581};
ipaddress = {'172.18.250.125','172.18.250.125'}; 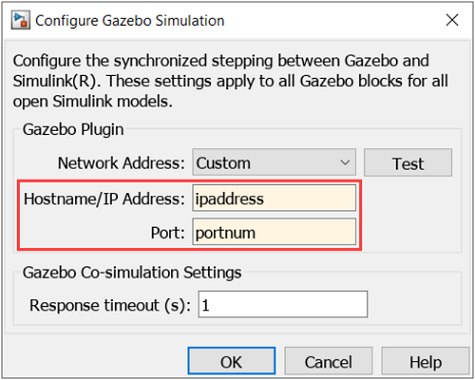
Version History
Introduced in R2019b