Uncertain Model Interconnections
Feedback Around an Uncertain Plant
It is possible to form interconnections of uss objects. A common example is to form the feedback interconnection of a given controller with an uncertain plant.
First create the uncertain plant. Start with two uncertain real parameters.
gamma = ureal('gamma',4); tau = ureal('tau',.5,'Percentage',30);
Next, create an unmodeled dynamics element, delta, and a first-order weighting function, whose DC value is 0.2, high-frequency gain is 10, and whose crossover frequency is 8 rad/sec.
delta = ultidyn('delta',[1 1],'SampleStateDimension',5); W = makeweight(0.2,6,6);
Finally, create the uncertain plant consisting of the uncertain parameters and the unmodeled dynamics.
P = tf(gamma,[tau 1])*(1+W*delta);
You can create an integral controller based on nominal plant parameters. Nominally the closed-loop system will have damping ratio of 0.707 and time constant of 2*tau.
KI = 1/(2*tau.Nominal*gamma.Nominal); C = tf(KI,[1 0]);
Create the uncertain closed-loop system using the feedback command.
CLP = feedback(P*C,1);
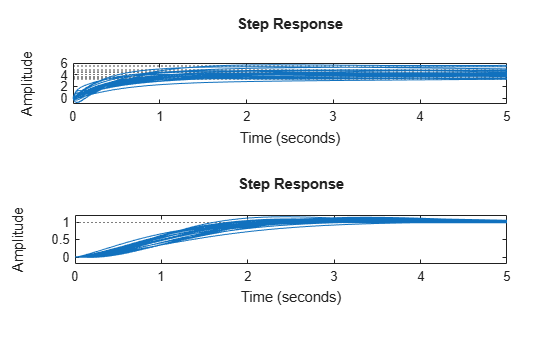
Plot samples of the open-loop and closed-loop step responses. As expected the integral controller reduces the variability in the low frequency response.
subplot(2,1,1); stepplot(P,5) subplot(2,1,2); stepplot(CLP,5)
Basic Model Interconnections
All the model arithmetic and model-interconnection commands of Control System Toolbox™ software work with uncertain models. These include:
For more information about model interconnections, see Model Interconnection.