fir2
Diseño de filtros FIR basados en muestreo de frecuencia
Descripción
b = fir2(n,f,m)n-ésimo orden con características de frecuencia-magnitud especificadas en los vectores f y m. La función interpola linealmente la respuesta en frecuencia deseada en una malla densa y utiliza la transformada de Fourier inversa y una ventana Hamming para obtener los coeficientes del filtro.
Ejemplos
Cargue el archivo MAT chirp. El archivo contiene una señal, y, muestreada a una frecuencia Fs = 8192 Hz. La señal tiene la mayor parte de su potencia por encima de Fs/4 = 2048 Hz o la mitad de la frecuencia de Nyquist. Añada ruido aleatorio a la señal.
load chirp
y = y + randn(size(y))/25;
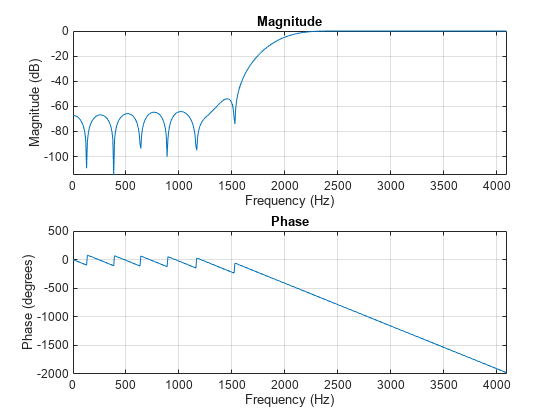
t = (0:length(y)-1)/Fs;Diseñe un filtro paso alto FIR de 34.º orden para atenuar los componentes de la señal por debajo de Fs/4. Especifique una frecuencia de corte normalizada de 0.48, que corresponde a unos 1966 Hz. Visualice la respuesta en frecuencia del filtro.
f = [0 0.48 0.48 1]; mhi = [0 0 1 1]; bhi = fir2(34,f,mhi); freqz(bhi,1,[],Fs)
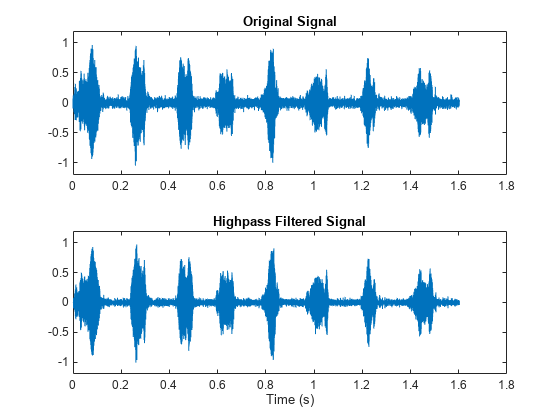
Filtre la señal chirp. Represente la señal antes y después del filtrado.
outhi = filter(bhi,1,y); figure subplot(2,1,1) plot(t,y) title('Original Signal') ylim([-1.2 1.2]) subplot(2,1,2) plot(t,outhi) title('Highpass Filtered Signal') xlabel('Time (s)') ylim([-1.2 1.2])
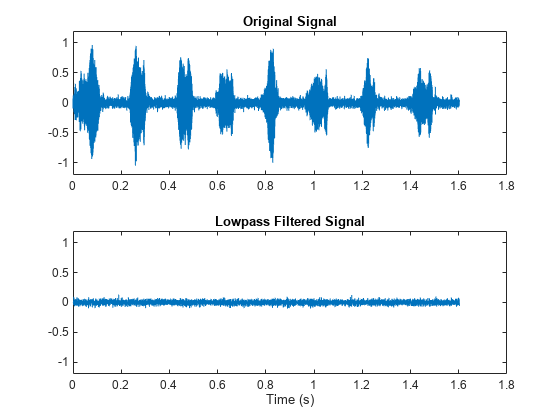
Cambie el filtro de paso alto a paso bajo. Utilice el mismo orden y frecuencia de corte. Filtre la señal de nuevo. El resultado es mayoritariamente ruido.
mlo = [1 1 0 0]; blo = fir2(34,f,mlo); outlo = filter(blo,1,y); subplot(2,1,1) plot(t,y) title('Original Signal') ylim([-1.2 1.2]) subplot(2,1,2) plot(t,outlo) title('Lowpass Filtered Signal') xlabel('Time (s)') ylim([-1.2 1.2])
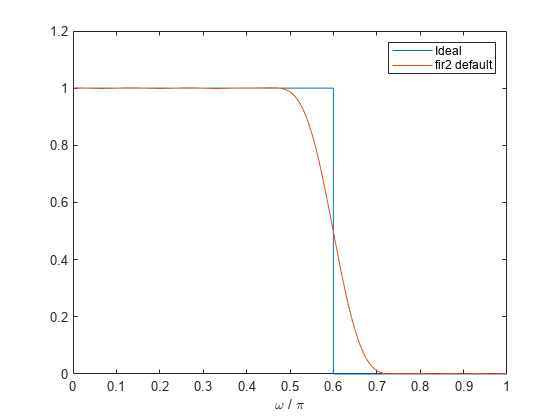
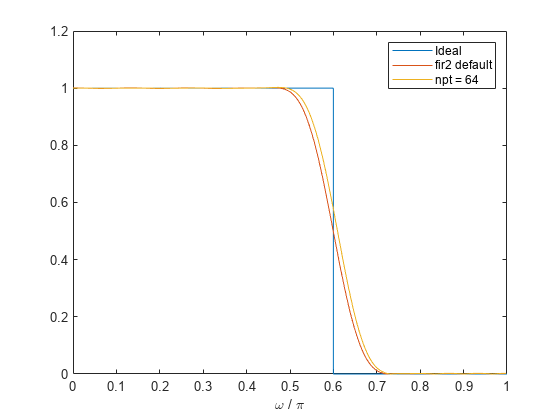
Diseñe un filtro paso bajo de 30.º orden con una frecuencia de corte normalizada de rad/muestra. Represente la respuesta en frecuencia ideal superpuesta con la respuesta en frecuencia real.
f = [0 0.6 0.6 1]; m = [1 1 0 0]; b1 = fir2(30,f,m); [h1,w] = freqz(b1,1); plot(f,m,w/pi,abs(h1)) xlabel('\omega / \pi') lgs = {'Ideal','fir2 default'}; legend(lgs)
Rediseñe el filtro utilizando una malla de interpolación de 64 puntos.
b2 = fir2(30,f,m,64); h2 = freqz(b2,1); hold on plot(w/pi,abs(h2)) lgs{3} = 'npt = 64'; legend(lgs)
Rediseñe el filtro utilizando la malla de interpolación de 64 puntos y un intervalo de 13 puntos alrededor de la frecuencia de corte.
b3 = fir2(30,f,m,64,13);
h3 = freqz(b3,1);
plot(w/pi,abs(h3))
lgs{4} = 'lap = 13';
legend(lgs)
Diseñe un filtro FIR con la siguiente respuesta en frecuencia:
Una sinusoide entre 0 y rad/muestra.
F1 = 0:0.01:0.18; A1 = 0.5+sin(2*pi*7.5*F1)/4;
Una sección lineal a trozos entre rad/muestra y rad/muestra.
F2 = [0.2 0.38 0.4 0.55 0.562 0.585 0.6 0.78]; A2 = [0.5 2.3 1 1 -0.2 -0.2 1 1];
Una sección cuadrática entre rad/muestra y la frecuencia de Nyquist.
F3 = 0.79:0.01:1; A3 = 0.2+18*(1-F3).^2;
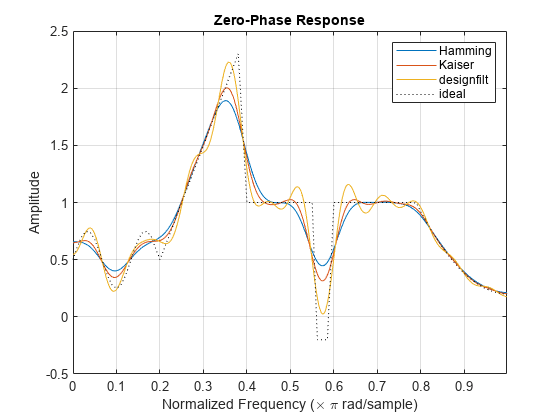
Diseñe el filtro utilizando una ventana Hamming. Especifique un orden de filtro de 50.
N = 50; FreqVect = [F1 F2 F3]; AmplVect = [A1 A2 A3]; ham = fir2(N,FreqVect,AmplVect);
Repita el cálculo utilizando una ventana Kaiser con un parámetro de forma de 3.
kai = fir2(N,FreqVect,AmplVect,kaiser(N+1,3));
Rediseñe el filtro utilizando la función designfilt. designfilt utiliza una ventana rectangular de forma predeterminada. Calcule la respuesta de fase cero del filtro en 1024 puntos.
d = designfilt('arbmagfir','FilterOrder',N, ... 'Frequencies',FreqVect,'Amplitudes',AmplVect); [zd,wd] = zerophase(d,1024);
Muestre las respuestas de fase cero de los tres filtros. Superponga la respuesta ideal.
zerophase(ham,1) hold on zerophase(kai,1) plot(wd/pi,zd) plot(FreqVect,AmplVect,'k:') legend('Hamming','Kaiser','designfilt','ideal')
Argumentos de entrada
Argumentos de salida
Algoritmos
fir2 utiliza el muestreo de frecuencia para diseñar filtros. La función interpola linealmente la respuesta en frecuencia deseada en una malla densa y uniformemente espaciada de longitud npt. fir2 también establece regiones de lap puntos alrededor de los valores repetidos de f para proporcionar transiciones inclinadas, pero suaves. Para obtener los coeficientes del filtro, la función aplica a la malla una transformada rápida de Fourier inversa y multiplica por window.
Referencias
[1] Jackson, L. B. Digital Filters and Signal Processing. 3rd Ed. Boston: Kluwer Academic Publishers, 1996.
[2] Mitra, Sanjit K. Digital Signal Processing: A Computer Based Approach. New York: McGraw-Hill, 1998.
Capacidades ampliadas
Historial de versiones
Introducido antes de R2006a