Rotational Friction
Fricción por contacto entre cuerpos en rotación

Bibliotecas:
Simscape /
Foundation Library /
Mechanical /
Rotational Elements
Descripción
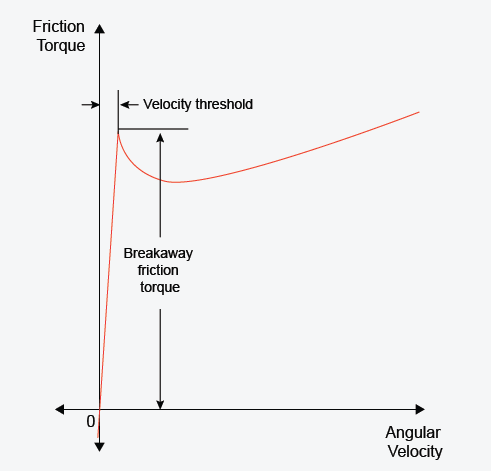
El bloque Rotational Friction representa la fricción por contacto entre cuerpos en rotación. El par motor de fricción se simula como función de la velocidad relativa y se asume que es la suma de Stribeck, Coulomb y los componentes viscosos, como se muestra en la siguiente figura.
La fricción de Stribeck, TS, es la característica de inclinación negativa que se produce a velocidades bajas [1]. La fricción de Coulomb, TC, tiene como resultado un par motor constante a cualquier velocidad. La fricción viscosa, TV, se opone al movimiento con un par motor directamente proporcional a la velocidad relativa. Solemos referirnos a la suma de las fricciones de Coulomb y Stribeck cerca de la velocidad cero como fricción de arranque Tbrk. La fricción se aproxima mediante las siguientes ecuaciones:
donde
T es el par motor de fricción.
TC es el par motor de fricción de Coulomb.
Tbrk es el par motor de fricción de arranque.
ωbrk es la velocidad de fricción de arranque.
ωSt es el umbral de velocidad de Stribeck.
ωCoul es el umbral de velocidad de Coulomb.
ωR y ωC son las velocidades angulares absolutas de los puertos R y C, respectivamente.
ω es la velocidad relativa.
f es el coeficiente de fricción viscosa.
La función exponencial utilizada en la parte de Stribeck de la ecuación de fuerza es continua y cae a magnitudes de velocidad superiores a la velocidad de fricción de arranque.
La función tangente hiperbólica utilizada en la parte de Coulomb de la ecuación de fuerza garantiza que la ecuación sea fluida y continua en ω = 0, pero alcanza rápidamente su valor total a velocidades distintas de cero.
La dirección positiva del bloque va del puerto R al puerto C. Esto significa que, si la velocidad del puerto R es mayor que la del puerto C, el bloque transmite el par motor de R a C.
Variables
Para establecer la prioridad y los valores objetivo iniciales para las variables del bloque antes de la simulación, utilice la sección Initial Targets en el cuadro de diálogo del bloque o de Property Inspector. Para obtener más información, consulte Establecer la prioridad y los valores objetivo iniciales para variables de bloque.
Los valores nominales ofrecen una forma de especificar la magnitud prevista de una variable en un modelo. Usar el escalado del sistema basado en valores nominales aumenta la solidez de la simulación. Los valores nominales pueden provenir de distintas fuentes, una de las cuales es la sección Nominal Values en el cuadro de diálogo del bloque o de Property Inspector. Para obtener más información, consulte Modify Nominal Values for a Block Variable.
Ejemplos

Sistema mecánico de rotación con oscilaciones con efecto stick-slip
Este modelo muestra un sistema mecánico de rotación con fricción por oscilaciones con efecto stick-slip. Se conecta una inercia a un punto fijo mediante el resorte y el amortiguador. La inercia se mueve por una fuente de velocidad a través de un elemento de fricción por oscilaciones con efecto stick-slip. El elemento de fricción presenta una diferencia entre la fricción de arranque y la de Coulomb, lo que provoca oscilaciones con efecto stick-slip de la inercia.
Puertos
Transferencia
Parámetros
Par motor de fricción de arranque, que es la suma de Coulomb y las fricciones estáticas. Debe ser mayor que o igual al valor Coulomb friction torque.
Velocidad angular a la que la fricción de Stribeck alcanza su pico. Llegados a este punto, la suma de la fricción de Stribeck y Coulomb es el valor Breakaway friction torque. Este parámetro especifica el umbral de velocidad, que afecta al tradeoff entre la precisión y la velocidad de la simulación.
Par motor de fricción de Coulomb, que es la fricción que se opone a la rotación con un par motor constante a cualquier velocidad.
Coeficiente de proporcionalidad entre el par motor de fricción y la velocidad angular relativa. El valor del parámetro debe ser mayor que o igual a cero.
Referencias
[1] Armstrong, B. and C.C. de Wit, Friction Modeling and Compensation, The Control Handbook, CRC Press, 1995.
Capacidades ampliadas
Historial de versiones
Introducido en R2007a
Consulte también
Rotational Damper | Rotational Hard Stop | Rotational Spring