detectAprilGridPoints
Syntax
Description
Single Image AprilGrid Detection
imagePoints = detectAprilGridPoints(I,patternDims,tagFamily)I. patternDims specifies the number of tags in
the pattern, and tagFamily specifies the AprilTag family.
[
detects an AprilGrid pattern in the image files specified by name in
imagePoints,imagesUsed] = detectAprilGridPoints(imageFileNames,___)imageFileNames, and additionally returns the list of images in
which the pattern is detected imagesUsed.
[___] = detectAprilGridPoints(
detects an AprilGrid in the specified images images,___)images.
Stereo Pair AprilGrid Detection
imagePoints = detectAprilGridPoints(images1,images2,patternDims,tagFamily)images1 and images2.
patternDims specifies the number of tags in the pattern, and
tagFamily specifies the AprilTag family.
[
detects an AprilGrid pattern in the stereo pairs of image files specified by the image
file names in imagePoints,pairsUsed] = detectAprilGridPoints(imageFileNames1,imageFileNames2,___)imageFileNames1 and
imageFileNames2. The function additionally returns a list of the
pairs in which the pattern is detected pairsUsed.
Optional Arguments
[___] = detectAprilGridPoints(___,
specifies options using one or more name-value arguments in addition to any combination of
arguments from previous syntaxes. For example, Name=Value)NumBorderBits=1 sets the
number of tag border bits to generate an AprilTag to 1.
Examples
Load the calibration image containing an AprilGrid into the workspace.
I = imread("aprilgrid.jpg");Define the AprilGrid properties.
tagFamily = "tag36h11";
patternDims = [6 6];Detect AprilGrid in the image.
imagePoints = detectAprilGridPoints(I,patternDims,tagFamily);
Display the detected keypoints of AprilGrid in the image.
imshow(I); hold on; plot(imagePoints(:,1),imagePoints(:,2),"yo");

Load a stereo image pair containing an AprilGrid pattern into the workspace.
I1 = imread("leftAprilGrid.jpg"); I2 = imread("rightAprilGrid.jpg");
Define the AprilGrid properties.
tagFamily = "tag36h11";
patternDims = [6 6];Detect the AprilGrid keypoints.
imagePoints = detectAprilGridPoints(I1,I2,patternDims,tagFamily);
Display the detected points on the image.
figure(1) imshow(I1) hold on plot(imagePoints(:,1,1,1),imagePoints(:,2,1,1),"go"); title("Left camera")

figure(2) imshow(I2) hold on plot(imagePoints(:,1,1,2),imagePoints(:,2,1,2),"go"); title("Right camera")

Input Arguments
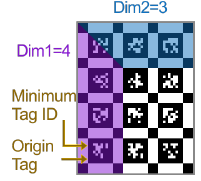
Pattern dimensions, specified as a two-element vector that represents the number of enclosed squares in the vertical and horizontal dimensions of the AprilGrid image, respectively.
For more details on AprilTag patterns, see Calibration Patterns.
AprilTag marker family used in the AprilGrid pattern, specified as
"tag36h11", "tag25h9", or
"tag16h5".
Image, specified as a 2-D truecolor image or grayscale image.
Data Types: uint8 | int16 | uint16 | single | double
Images, specified as an H-by-W-by-numColorChannels-by-numImages array, where H and W describe the height and width of each image, respectively. numColorChannels is the number of color channels in each image, and numImages is the number of images.
Data Types: uint8 | int16 | uint16 | single | double
Stereo pair images from camera one, specified as an H-by-W-by-numColorChannels-by-numImages array, where H and W describe the height and width of each image, respectively. numColorChannels is the number of color channels in each image, and numImages is the number of images.
Data Types: uint8 | int16 | uint16 | single | double
Stereo pair images from camera two, specified as an H-by-W-by-numColorChannels-by-numImages array, where H and W describe the height and width of each image, respectively. numColorChannels is the number of color channels in each image, and numImages is the number of images.
Data Types: uint8 | int16 | uint16 | single | double
Image filenames, specified as a cell array of character vectors or an array of strings.
Stereo image filenames for camera one, specified as a cell array of character vectors or an array of strings.
Stereo image filenames for camera two, specified as a cell array of character vectors or an array of strings.
Name-Value Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2024b