stereoParameters
Object for storing stereo camera system parameters
Description
The stereoParameters object stores the intrinsic and
extrinsic parameters of two cameras and their geometric relationship.
Creation
You can create a stereoParameters object using the
stereoParameters function described here. You can also create a
stereoParameters object by using the estimateCameraParameters with an
M-by-2-by-numImages-by-2 array of input image
points, where M is the number of keypoint coordinates in each
pattern.
Syntax
Description
stereoParams = stereoParameters(
returns a stereo camera system parameters object using the camera parameters
from two cameras and the pose of camera 2.
cameraParameters1,cameraParameters2,poseCamera2)cameraParameters1 and
cameraParameters2 are cameraParameters or cameraIntrinsics objects that
contain the intrinsics of camera 1 and camera 2, respectively. The three input
arguments set the CameraParameters1,
CameraParameters2, and
PoseCamera2 properties,
respectively.
stereoParams = stereoParameters(
creates an identical paramStruct)stereoParameters object from an existing
stereoParameters object with parameters stored in
paramStruct.
Input Arguments
Properties
Intrinsic and extrinsic parameters of the two cameras
Parameters of camera 1, specified as a cameraParameters object. The object contains the intrinsic,
extrinsic, and lens distortion parameters of a camera.
Parameters of camera 2, specified as a cameraParameters object. The object contains the intrinsic,
extrinsic, and lens distortion parameters of a camera.
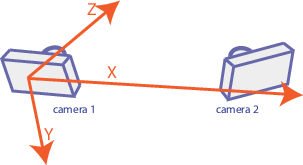
Geometric relationship between the two cameras
Relative pose of the second camera, specified as a rigidtform3d object. The R and the
Translation properties of the object represent the
relative rotation and translation between camera 1 and camera 2,
respectively. They convert camera 2 coordinates back to camera 1 coordinates
using:
orientation1 = orientation2 * R location1 = orientation2 * Translation + location2
orientation1
and location1 represent the absolute pose of camera 1,
and orientation2 and location2
represent the absolute pose of camera 2.
You cannot set the value of PoseCamera2 after you
create the stereoParameters object.
Fundamental matrix, stored as a 3-by-3 matrix. The fundamental matrix relates the two stereo cameras, such that the following equation must be true:
P1, the point in image 1, corresponds to the point, P2, in image 2. Both points are expressed in pixel coordinates.
Essential matrix, stored as a 3-by-3 matrix. The essential matrix relates the two stereo cameras, such that the following equation must be true:
P1, the point in image 1, corresponds to P2, the point in image 2. Both points are expressed in normalized image coordinates, where the origin is at the camera’s optical center. The x and y pixel coordinates are normalized by the focal length fx and fy.
Accuracy of estimated parameters
Average Euclidean distance between reprojected points and detected points over all image pairs, specified in pixels.
Settings for camera parameter estimation
Number of calibration patterns that estimate the extrinsics of the two cameras, stored as an integer.
World coordinates of key points in the calibration pattern, specified as an M-by-2 array. M represents the number of key points in the pattern.
World points units, specified as a character vector. The character vector describes the units of measure.
Object Functions
toStruct | Convert a stereo parameters object into a struct |
Examples
Specify calibration images.
leftImages = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","stereo","left")); rightImages = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","stereo","right"));
Detect the checkerboards.
[imagePoints,patternDims] = ...
detectCheckerboardPoints(leftImages.Files,rightImages.Files);Specify the world coordinates of the checkerboard keypoints. Square size is in millimeters.
squareSize = 108; % millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
Calibrate the stereo camera system. Both cameras have the same resolution.
I = readimage(leftImages,1); imageSize = size(I,1:2); params = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize);
Visualize the calibration accuracy.
showReprojectionErrors(params)

Visualize camera extrinsics.
figure showExtrinsics(params)

Convert to structure.
paramsStruct = toStruct(params)
paramsStruct = struct with fields:
CameraParameters1: [1×1 struct]
CameraParameters2: [1×1 struct]
RotationOfCamera2: [3×3 double]
TranslationOfCamera2: [-119.8720 -0.4005 -0.0258]
Version: [1×1 struct]
RectificationParams: [1×1 struct]
References
[1] .
[2]
Extended Capabilities
Version History
Introduced in R2014aSee Also
Apps
Objects
stereoCalibrationErrors|intrinsicsEstimationErrors|extrinsicsEstimationErrors|cameraParameters|cameraIntrinsics