pcregistercorr
Register two point clouds using phase correlation
Syntax
Description
tform = pcregistercorr(moving,fixed,gridSize,gridStep)moving, to the fixed point cloud
fixed, using an image-based phase correlation
algorithm.
The function performs registration by first converting both point clouds to a 2-D occupancy grid in the X-Y plane with center at the origin (0,0,0). The occupancy of each grid cell is determined using the Z-coordinate values of points within the grid.
[___] = pcregistercorr(___,
specifies options using one or more name-value arguments in addition to any
combination of arguments from previous syntaxes. For example,
Name=Value)Window=false sets the Window
name-value argument to false to suppress using
windowing.
Examples
Read data from a Velodyne® packet capture (PCAP) file into the workspace.
veloReader = velodyneFileReader('lidarData_ConstructionRoad.pcap','HDL32E');
Read a fixed and a moving point cloud from frames of the lidar data.
frameNumber = 1; skipFrame = 5; fixed = readFrame(veloReader,frameNumber); moving = readFrame(veloReader,frameNumber + skipFrame);
Find the ground planes for both the moving and the fixed point clouds. Set the maximum distance in meters.
maxDistance = 0.4; referenceVector = [0 0 1]; groundMoving = pcfitplane(moving,maxDistance,referenceVector); groundFixed = pcfitplane(fixed,maxDistance,referenceVector);
Transform the point clouds so that their ground planes are parallel to the X-Y plane.
tformMoving = normalRotation(groundMoving,referenceVector); tformFixed = normalRotation(groundFixed,referenceVector); movingCorrected = pctransform(moving,tformMoving); fixedCorrected = pctransform(fixed,tformFixed);
Register the moving point cloud against the fixed point cloud. Set the occupancy grid size to 100-by-100 meters and the size of each grid cell to 0.5-by-0.5 meters.
gridSize = 100; gridStep = 0.5; tform = pcregistercorr(movingCorrected,fixedCorrected,gridSize,gridStep);
Transform the moving point cloud using the estimated rigid transformation.
combinedTform = rigidtform3d(tformFixed.A * tformMoving.A * tform.A); movingReg = pctransform(moving,combinedTform);
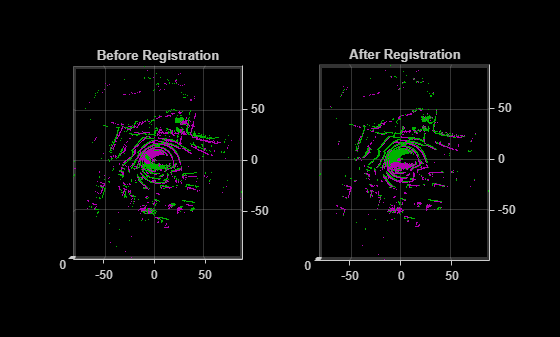
Visualize the registration.
figure subplot(121) pcshowpair(moving,fixed) title('Before Registration') view(2) subplot(122) pcshowpair(movingReg,fixed) title('After Registration') view(2)
Input Arguments
Name-Value Arguments
Output Arguments
Tips
The phase correlation method is best used to register point clouds when the transformation can be described by a translation in the X-Y plane and a rotation around the Z-axis. For example, a ground vehicle with a horizontally mounted lidar moving on a flat surface.
The phase correlation algorithm expects motion to be exclusively along the X-Y plane, as with the ground plane. If motion is not exactly in the X-Y plane, you can use the
normalRotationfunction to transform the point clouds. For example, in vehicular motion, you can reduce the effects of vehicle suspension or surface features such as potholes and speed bumps by using thenormalRotationfunction.Increasing the size of the occupancy grid increases the computational demands of this function. You can control the size of the occupancy grid by modifying the
gridSizeandgridSteparguments.If you obtain poor registration results and the
peakcorrelation value is less than0.03, try setting theWindowargument tofalse.
References
[1] Dimitrievski, Martin, David Van Hamme, Peter Veelaert, and Wilfried Philips. “Robust Matching of Occupancy Maps for Odometry in Autonomous Vehicles.” In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications, 626–633. Rome, Italy: SCITEPRESS - Science and Technology Publications, 2016.
[2] Reddy, B.S., and B.N. Chatterji. “An FFT-Based Technique for Translation, Rotation, and Scale-Invariant Image Registration.” IEEE Transactions on Image Processing 5, no. 8 (August 1996): 1266–71. https://doi.org/10.1109/83.506761.
Extended Capabilities
Version History
Introduced in R2020bSee Also
Functions
pcregisterndt|pcregistericp|pcregistercpd|pctransform|pcshow|pcshowpair|pcdownsample|pcfitplane|imregcorr|normalRotation|pcdenoise|pcmerge