planeModel
Object for storing parametric plane model
Description
Construct and store a parametric plane model based on parameters that describe a plane.
Creation
Description
model = planeModel(parameters)Parameters input vector that describes a plane.
Input Arguments
Properties
Object Functions
plot | Plot parametric model |
normalRotation | Compute transform for rotation of normal to plane |
Examples
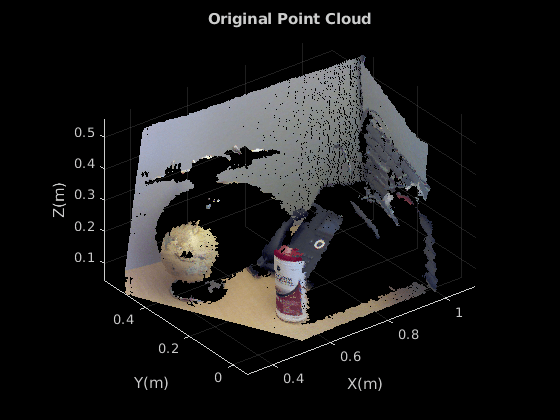
Load the point cloud.
load("object3d.mat")Display the point cloud and label the figure.
figure pcshow(ptCloud) xlabel("X(m)") ylabel("Y(m)") zlabel("Z(m)") title("Original Point Cloud")
Set the maximum point-to-plane distance (2cm) for plane fitting.
maxDistance = 0.02;
Set the normal vector of the plane.
referenceVector = [0,0,1];
Set the maximum angular distance to 5 degrees.
maxAngularDistance = 5;
Detect the first plane, the table, and extract it from the point cloud.
[model1,inlierIndices,outlierIndices] = pcfitplane(ptCloud,...
maxDistance,referenceVector,maxAngularDistance);
plane1 = select(ptCloud,inlierIndices);
remainPtCloud = select(ptCloud,outlierIndices);Set the region of interest to constrain the search for the second plane, left wall.
roi = [-inf,inf;0.4,inf;-inf,inf]; sampleIndices = findPointsInROI(remainPtCloud,roi);
Detect the left wall and extract it from the remaining point cloud.
[model2,inlierIndices,outlierIndices] = pcfitplane(remainPtCloud,...
maxDistance,SampleIndices=sampleIndices);
plane2 = select(remainPtCloud,inlierIndices);
remainPtCloud = select(remainPtCloud,outlierIndices);Plot the two planes and the remaining points.
figure
pcshow(plane1)
title("First Plane")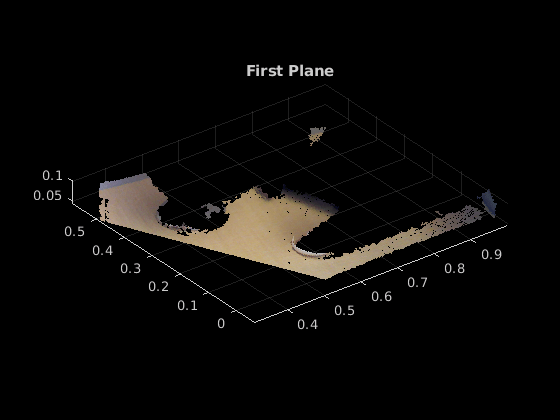
figure
pcshow(plane2)
title("Second Plane")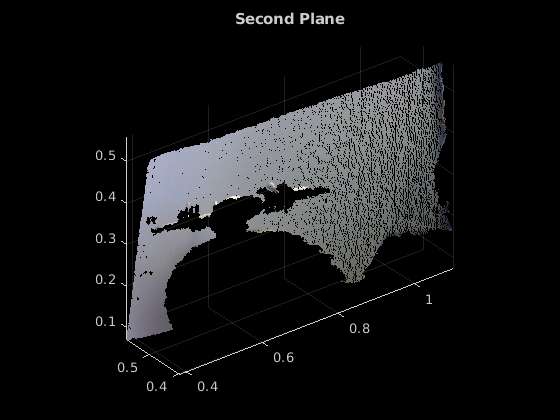
figure
pcshow(remainPtCloud)
title("Remaining Point Cloud")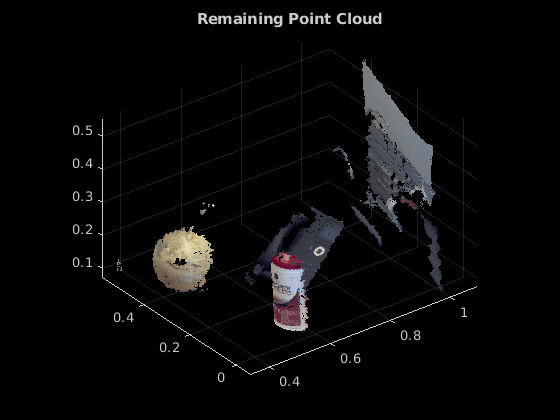
Version History
Introduced in R2015b
See Also
Objects
Functions
pcfitcylinder|pcfitplane|pcfitsphere|pcshow|pcmerge|pctransform|pcdenoise|pcdownsample|pcwrite|pcread|pcregistericp