Programación de ganancias
Un controlador con planificación de ganancia es un controlador cuyas ganancias se han ajustado automáticamente como una función de tiempo, una condición de funcionamiento o parámetros de la planta. La programación de ganancias es una estrategia frecuente para el control de sistemas cuya dinámica cambia con el tiempo o con la condición de funcionamiento. Dichos sistemas incluyen sistemas lineales de parámetros variantes (LPV) y clases de sistemas no lineales de gran tamaño. Para ajustar controladores con planificación de ganancia en MATLAB® o Simulink®, se representa la ganancia de las variables como una función de las variables de la programación con el comando tunableSurface. Para obtener una visión general del flujo de trabajo de ajuste de los controladores con planificación de ganancia, consulte Gain Scheduling Basics.
Funciones
Bloques
Temas
Sistemas de control con planificación de ganancia
- Gain Scheduling Basics
Gain scheduling is an approach to control of non-linear systems using a family of linear controllers, each providing satisfactory control for a different operating point of the system. - Model Gain-Scheduled Control Systems in Simulink
In Simulink, model gain schedules using lookup tables, interpolation blocks, or MATLAB Function blocks.
Ajuste de programaciones de ganancias
- Tune Gain Schedules in Simulink
Understand the general tuning workflow for usingsystuneto tune gain-scheduled controllers. - Plant Models for Gain-Scheduled Controller Tuning
To tune a gain-scheduled control system, you need a collection of linear models describing the plant dynamics at the selected design points. - Multiple Design Points in slTuner Interface
For tuning a gain-scheduled control system, associate a family of linear plant models with theslTunerinterface to your Simulink model. - Parameterize Gain Schedules
A gain surface parameterizes a variable gain in terms of the scheduling variables. Use gain surfaces to model variable gains in a gain-scheduled control system. - Change Requirements with Operating Condition
When tuning gain-scheduled controllers, you can specify tuning objectives that depend on the scheduling variables. - Validate Gain-Scheduled Control Systems
Tuning gain-scheduled controllers guarantees suitable performance only near each design point. It is important to validate the tuning results over the full range of operating conditions.
Caso práctico: piloto automático de un HL-20
- Trimming and Linearization of the HL-20 Airframe
Linearize an airframe model at an array of design points to use for gain-scheduled control design. - Angular Rate Control in the HL-20 Autopilot
Tune gain-scheduled PI controllers for the inner loop of the HL-20 airframe model. - Attitude Control in the HL-20 Autopilot - SISO Design
Tune a gain-scheduled SISO architecture for controlling roll, pitch, and yaw of the airframe. - Attitude Control in the HL-20 Autopilot - MIMO Design
Tune a gain-scheduled MIMO architecture for controlling roll, pitch, and yaw of the airframe. - MATLAB Workflow for Tuning the HL-20 Autopilot
Design a gain-scheduled control system for the HL-20 airframe in MATLAB.
Ejemplos destacados
Design Family of PID Controllers for Multiple Operating Points
If your nonlinear Simulink model operates over a wide range of operating conditions, you can design an array of PID controllers for multiple model operating points.

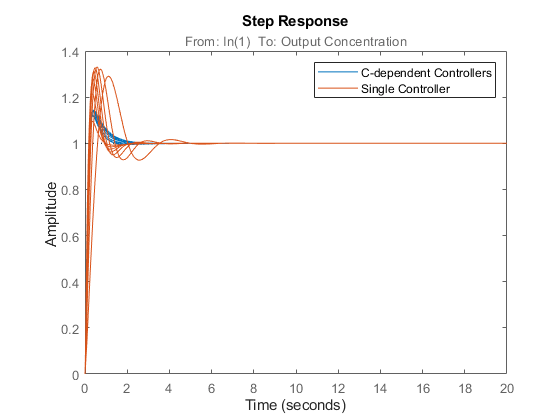
Gain-Scheduled Control of a Chemical Reactor
Tune a gain-scheduled controller for a chemical reactor transitioning from low to high conversion rate.

Tuning of Gain-Scheduled Three-Loop Autopilot
Uses systune to generate smooth gain-schedules for a
two-dimensional grid of operating conditions for a control system modeled in Simulink.