step
Respuesta al escalón de un sistema dinámico
Sintaxis
Descripción
step calcula la respuesta al escalón ante un cambio de escalón en el valor de entrada de U a U + dU después de td unidades de tiempo.

En este caso,
t0 es el tiempo de inicio de la simulación.
td es el retardo de escalón.
U es el valor de entrada de referencia o sesgo.
dU es la amplitud del escalón.
De forma predeterminada, la función aplica el escalón para t0 = 0, U = 0, dU = 1 y td = 0. Pero se pueden configurar estos valores usando RespConfig. También puede especificar el estado inicial x(t0). Cuando no se especifica, step supone que el sistema está inicialmente en reposo con un nivel de entrada U.
[ simula la respuesta para las unidades de tiempo especificadas por y,tOut] = step(sys,t)t. Para definir las unidades de tiempo, puede especificar:
El tiempo final de la simulación usando un valor escalar.
El tiempo inicial y final de la simulación usando un vector de dos elementos. (desde R2023b)
Todas las unidades de tiempo usando un vector.
[ especifica opciones adicionales para calcular la respuesta al escalón, como el nivel de amplitud del escalón y el desplazamiento de entrada. Use y,tOut] = step(___,config)RespConfig para crear config.
step(___) representa la respuesta al escalón de sys con opciones de representación predeterminadas para todas las combinaciones de argumentos de entrada anteriores. Para ver más opciones de personalización de gráficas, utilice stepplot.
Para representar respuestas para múltiples sistemas dinámicos en la misma gráfica, puede especificar
syscomo lista de modelos separada por comas. Por ejemplo,step(sys1,sys2,sys3)representa las respuestas para tres modelos en la misma gráfica.Para especificar un color, un estilo de línea y un marcador para cada sistema de la gráfica, especifique un valor
LineSpecpara cada sistema. Por ejemplo,step(sys1,LineSpec1,sys2,LineSpec2)representa dos modelos y especifica su estilo de gráfica. Para obtener más información sobre cómo especificar un valorLineSpec, consultestepplot.
Ejemplos
Represente la respuesta al escalón de un sistema en tiempo continuo representado por la siguiente función de transferencia.
Para este ejemplo, cree un modelo tf que represente la función de transferencia. De forma similar, puede representar la respuesta al escalón de otros tipos de modelos de sistema dinámico, como modelos de cero-polo-ganancia (zpk) o en espacio de estados (ss).
sys = tf(4,[1 2 10]);
Represente la respuesta al escalón.
step(sys)

La gráfica step incluye automáticamente una línea de puntos horizontal que indica la respuesta de estado estacionario. En una ventana de figuras de MATLAB®, puede hacer clic con el botón secundario en la gráfica para ver otras características de respuesta al escalón, como respuesta pico y tiempo de establecimiento. Para más información sobre estas características, consulte stepinfo.
Represente la respuesta al escalón de un sistema en tiempo discreto. El sistema cuenta con un tiempo de muestreo de 0,2 s y está representado por las siguientes matrices de espacio de estados.
A = [1.6 -0.7;
1 0];
B = [0.5; 0];
C = [0.1 0.1];
D = 0;Cree el modelo en espacio de estados y represente su respuesta al escalón.
sys = ss(A,B,C,D,0.2); step(sys)

La respuesta al escalón refleja la discretización del modelo, mostrando la respuesta calculada cada 0,2 s.
Examine la respuesta al escalón de la siguiente función de transferencia.
sys = zpk(-1,[-0.2+3j,-0.2-3j],1) * tf([1 1],[1 0.05])
sys =
(s+1)^2
----------------------------
(s+0.05) (s^2 + 0.4s + 9.04)
Continuous-time zero/pole/gain model.
Model Properties
step(sys)
De forma predeterminada, step elige un tiempo final que ilustra el estado estacionario al que tiende la respuesta. No obstante, este sistema cuenta con transitorios rápidos que se ocultan en esta escala de tiempo. Para examinar la respuesta al transitorio más detalladamente, limite la gráfica de escalón a t = 15 s.
step(sys,15)


Como alternativa, puede especificar los tiempos exactos en los que desea examinar la respuesta al escalón, siempre y cuando estén separados por un intervalo constante. Por ejemplo, examine la respuesta desde el final del transitorio hasta que el sistema alcance el estado estacionario.
t = 20:0.2:120; step(sys,t)

Aunque esta gráfica comienza en t = 20, step siempre aplica la entrada de escalón en t = 0.
Considere el siguiente modelo en espacio de estados de segundo orden:
A = [-0.5572,-0.7814;0.7814,0]; B = [1,-1;0,2]; C = [1.9691,6.4493]; sys = ss(A,B,C,0);
Este modelo tiene dos entradas y una salida, de modo que cuenta con dos canales: desde la primera entrada hasta la salida y desde la segunda entrada hasta la salida. Cada canal cuenta con su propia respuesta al escalón.
Cuando utiliza step, esta función calcula las respuestas de todos los canales.
step(sys)
La gráfica de la izquierda muestra la respuesta al escalón del primer canal de entrada, y la gráfica de la derecha, la del segundo. Cuando utiliza step para representar las respuestas de un modelo MIMO, esta función genera un arreglo de gráficas que representa todos los canales de E/S del modelo. Por ejemplo, cree un modelo en espacio de estados aleatorio con cinco estados, tres entradas y dos salidas, y represente su respuesta al escalón.
sys = rss(5,2,3); step(sys)


En una ventana de figuras de MATLAB, puede restringir la gráfica a un subconjunto de canales haciendo clic con el botón secundario en la gráfica y seleccionando I/O Selector.
step permite representar las respuestas de múltiples sistemas dinámicos en el mismo eje. Por ejemplo, compare la respuesta en lazo cerrado de un sistema con un controlador PI y un controlador PID. Cree una función de transferencia del sistema y ajuste los controladores.
H = tf(4,[1 2 10]); C1 = pidtune(H,'PI'); C2 = pidtune(H,'PID');
Forme los sistemas de lazo cerrado y represente sus respuestas al escalón.
sys1 = feedback(H*C1,1); sys2 = feedback(H*C2,1); step(sys1,sys2) legend('PI','PID','Location','SouthEast')

De forma predeterminada, step elige colores diferentes para cada sistema que se representa. Puede especificar los colores y los estilos de línea utilizando el argumento de entrada LineSpec.
step(sys1,'r--',sys2,'b') legend('PI','PID','Location','SouthEast')

La primera instancia de LineSpec 'r--' especifica una línea discontinua roja para la respuesta con el controlador PI. La segunda LineSpec 'b' especifica una línea continua azul para la respuesta con el controlador PID. La leyenda muestra los colores y los estilos de línea especificados. Para ver más opciones de personalización de gráficas, utilice stepplot.
El ejemplo Compare Responses of Multiple Systems (Comparar respuestas de múltiples sistemas) muestra cómo representar respuestas de múltiples sistemas individuales en un único eje. Cuando tiene múltiples sistemas dinámicos en un arreglo de modelos, step representa todas sus respuestas a la vez.
Cree un arreglo de modelos. Para este ejemplo, utilice un arreglo unidimensional de funciones de transferencia de segundo orden con diferentes frecuencias naturales. Primero, asigne previamente memoria para el arreglo de modelos. El siguiente comando crea una fila de 1 por 5 de funciones de transferencia SISO de ganancia cero. Las primeras dos dimensiones representan las salidas y entradas del modelo. Las dimensiones restantes son las dimensiones del arreglo.
sys = tf(zeros(1,1,1,5));
Rellene el arreglo.
w0 = 1.5:1:5.5; % natural frequencies zeta = 0.5; % damping constant for i = 1:length(w0) sys(:,:,1,i) = tf(w0(i)^2,[1 2*zeta*w0(i) w0(i)^2]); end
(Para más información sobre los arreglos de modelos y cómo crearlos, consulte Model Arrays). Represente las respuestas al escalón de todos los modelos del arreglo.
step(sys)

step utiliza el mismo estilo de línea para las respuestas de todas las entradas del arreglo. Una manera de distinguir entre las entradas es utilizar la propiedad SamplingGrid de los modelos de sistemas dinámicos para asociar cada entrada del arreglo con el valor w0 correspondiente.
sys.SamplingGrid = struct('frequency',w0);Cuando represente las respuestas en una ventana de figuras de MATLAB, puede hacer clic en una traza para ver a qué valor de frecuencia corresponde.
Cuando indica un argumento de salida, step devuelve un arreglo de datos de respuesta. En un sistema SISO, los datos de respuesta se devuelven como un vector columna de longitud igual al número de puntos de tiempo en los que se muestrea la respuesta. Puede proporcionar el vector t de puntos de tiempo o permitir que step seleccione los puntos de tiempo en función de la dinámica del sistema. Por ejemplo, extraiga la respuesta al escalón de un sistema SISO en 101 puntos de tiempo entre t = 0 y t = 5 s.
sys = tf(4,[1 2 10]); t = 0:0.05:5; y = step(sys,t); size(y)
ans = 1×2
101 1
En un sistema MIMO, los datos de respuesta se devuelven en un arreglo de dimensiones N por Ny por Nu, donde Ny y Nu son el número de salidas y entradas del sistema dinámico. Por ejemplo, considere el siguiente modelo en espacio de estados, que representa un sistema de dos entradas y una salida.
A = [-0.5572,-0.7814;0.7814,0]; B = [1,-1;0,2]; C = [1.9691,6.4493]; sys = ss(A,B,C,0);
Extraiga la respuesta al escalón de este sistema en 200 puntos de tiempo entre t = 0 y t = 20 s.
t = linspace(0,20,200); y = step(sys,t); size(y)
ans = 1×3
200 1 2
y(:,i,j) es un vector columna que contiene la respuesta al escalón desde la j-ésima entrada hasta la i-ésima salida en los tiempos t. Por ejemplo, extraiga la respuesta al escalón desde la segunda entrada hasta la salida.
y12 = y(:,1,2); plot(t,y12)

Cree un lazo de retroalimentación con retardo y represente su respuesta al escalón.
s = tf('s');
G = exp(-s) * (0.8*s^2+s+2)/(s^2+s);
sys = feedback(ss(G),1);
step(sys)
La respuesta al escalón del sistema mostrada es desordenada. La respuesta al escalón de sistemas con retardos internos puede presentar un comportamiento extraño, como saltos recurrentes. Este tipo de comportamiento es una característica del sistema, no una anomalía del software.
De forma predeterminada, step aplica una señal de entrada que cambia de 0 a 1 en t = 0. Para personalizar la amplitud y el sesgo, utilice RespConfig. Por ejemplo, calcule la respuesta de un modelo en espacio de estados SISO a una señal que cambia de 1 a –1 en t = 0.
A = [1.6 -0.7;
1 0];
B = [0.5; 0];
C = [0.1 0.1];
D = 0;
sys = ss(A,B,C,D,0.2);
opt = RespConfig;
opt.Bias = 1;
opt.Amplitude = -2;
step(sys,opt)
Para respuestas a señales de entrada arbitrarias, utilice lsim.
Compare la respuesta al escalón de un modelo paramétrico identificado con la de un modelo (empírico) no paramétrico. Vea también sus 3 regiones de confianza .
Cargue los datos.
load iddata1 z1
Realice la estimación de un modelo paramétrico.
sys1 = ssest(z1,4);
Realice la estimación de un modelo no paramétrico.
sys2 = impulseest(z1);
Represente las respuestas al escalón para compararlas.
t = (0:0.1:10)'; [y1, ~, ~, ysd1] = step(sys1,t); [y2, ~, ~, ysd2] = step(sys2,t); plot(t, y1, 'b', t, y1+3*ysd1, 'b:', t, y1-3*ysd1, 'b:') hold on plot(t, y2, 'g', t, y2+3*ysd2, 'g:', t, y2-3*ysd2, 'g:')

Calcule la respuesta al escalón de un modelo de series temporales identificado.
Un modelo de series temporales, también denominado modelo de señales, es un modelo sin señales de entrada medidas. La gráfica de escalón de este modelo utiliza su canal de ruido (no medido) como canal de entrada al que se aplica la señal de escalón.
Cargue los datos.
load iddata9;Realice la estimación de un modelo de series temporales.
sys = ar(z9, 4);
sys es un modelo con el formato A y(t) = e(t), donde e(t) representa el canal de ruido. Para calcular la respuesta al escalón, e(t) se trata como un canal de entrada y se denomina e@y1.
Represente la respuesta al escalón.
step(sys)

Valide la linealización de un modelo ARX no lineal comparando las respuestas al escalón de amplitud pequeña de los modelos lineales y no lineales.
Cargue los datos.
load iddata2 z2;
Realice la estimación de un modelo ARX no lineal.
nlsys = nlarx(z2,[4 3 10],idTreePartition,'custom',... {'sin(y1(t-2)*u1(t))+y1(t-2)*u1(t)+u1(t).*u1(t-13)',... 'y1(t-5)*y1(t-5)*y1(t-1)'},'nlr',[1:5, 7 9]);
Determine un punto de funcionamiento de equilibrio de nlsys que corresponda a un valor de entrada de estado estacionario de 1.
u0 = 1;
[X,~,r] = findop(nlsys, 'steady', 1);
y0 = r.SignalLevels.Output;Obtenga una aproximación lineal de nlsys en este punto de funcionamiento.
sys = linearize(nlsys,u0,X);
Valide la utilidad de sys comparando su respuesta al escalón de amplitud pequeña con la de nlsys.
El sistema no lineal nlsys funciona a un nivel de equilibrio dictado por (u0,y0). Introduzca una perturbación de escalón de 0,1 sobre este estado estacionario y calcule la respuesta correspondiente.
opt = RespConfig; opt.InputOffset = u0; opt.Amplitude = 0.1; t = (0:0.1:10)'; ynl = step(nlsys, t, opt);
El sistema lineal sys expresa la relación entre las perturbaciones en la entrada y la correspondiente perturbación en la salida. No tiene conocimiento de los valores de equilibrio del sistema no lineal.
Represente la respuesta al escalón del sistema lineal.
opt = RespConfig; opt.Amplitude = 0.1; yl = step(sys, t, opt);
Añada el desplazamiento de estado estacionario, y0, a la repuesta del sistema lineal y represente las respuestas.
plot(t, ynl, t, yl+y0) legend('Nonlinear', 'Linear with offset')

Calcule y represente la respuesta al escalón de un modelo LPV (lpvss). Este ejemplo simula la respuesta al escalón de lazo cerrado de un modelo de bola levitante definido en fcnMaglev.m a una perturbación .

Cree y discretice el modelo.
hmin = 0.05; hmax = 0.25; h0 = (hmin+hmax)/2; Ts = 0.01; Glpv = lpvss("h",@fcnMaglev,0,0,h0); Glpvd = c2d(Glpv,Ts,"tustin");
Realice muestreo del modelo LPV para tres valores de altura y ajuste un controlador PID.
hpid = linspace(hmin,hmax,3);
[Ga,Goffset] = sample(Glpvd,[],hpid);
wc = 50;
Ka = pidtune(Ga,"pidf",wc);
Ka.Tf = 0.01;Cree el controlador PID con planificación de ganancia.
Ka.SamplingGrid = struct("h",hpid); Koffset = struct("y",{Goffset.u}); Clpv = ssInterpolant(ss(Ka),Koffset);
Cree el modelo de lazo cerrado.
CL = feedback(Glpvd*[1,Clpv],1,2,1);
CL.InputName = {'du';'href'};
CL.OutputName = "h";Obtenga la corriente de estado estacionario para = para calcular un tamaño adecuado para la perturbación de paso a la entrada de la planta.
[~,~,~,~,~,~,~,u0] = Glpv.DataFunction(0,h0);
Calcule y represente la respuesta ante la perturbación de entrada y cambio de escalón en la referencia. Establezca las señales de entrada de referencia = 0 y = para especificar la condición de estado estacionario inicial.
t = 0:Ts:2; pFcn = @(k,x,u) x(1); Config = RespConfig( ... Bias=[0;h0], ... Amplitude=0.2*[u0;h0]*Ts, ... Delay=0.5, ... InitialParameter=h0); step(CL,t,pFcn,Config) title("Current Step Disturbance and Height Step Change")

Cree un modelo en espacio de estados con coeficientes complejos.
A = [-2-2i -2;1 0]; B = [2;0]; C = [0 0.5+2.5i]; D = 0; sys = ss(A,B,C,D);
Calcule la respuesta al escalón del sistema.
[y,t] = step(sys);
Los datos de respuesta resultantes contienen valores de salida complejos.
y
Desde R2026a
Este ejemplo muestra por qué es necesario validar variando el tiempo de muestreo cuando se simulan modelos con retardos internos.
Cargue el modelo.
load idelayModel.mat
sys.InternalDelayans = 0.5166
Encuentre los márgenes de estabilidad de sys. allmargin indica que la respuesta en lazo cerrado debe ser inestable.
s = allmargin(sys)
s = struct with fields:
GainMargin: [1.3867 0.9727 10.6798 20.1934 29.4912 38.7266 47.9352 57.1304 66.3172 75.4988 84.6770 93.8527 103.0266 112.1991 121.3705 130.5412 139.7111 148.8805 158.0495 167.2181 176.3864 185.5544 194.7221 203.8897 213.0571 222.2243 … ] (1×49 double)
GMFrequency: [0.0467 5.0880 15.2373 27.3818 39.5403 51.7014 63.8635 76.0266 88.1895 100.3526 112.5158 124.6791 136.8424 149.0058 161.1692 173.3326 185.4960 197.6594 209.8229 221.9864 234.1499 246.3134 258.4768 270.6404 282.8039 … ] (1×49 double)
PhaseMargin: [36.6926 -142.9664 113.4224 37.7140 -6.4674]
PMFrequency: [0.0250 0.2899 0.8836 4.8597 5.1320]
DelayMargin: [25.6083 13.0665 2.2403 0.1354 -0.0220]
DMFrequency: [0.0250 0.2899 0.8836 4.8597 5.1320]
Stable: 0
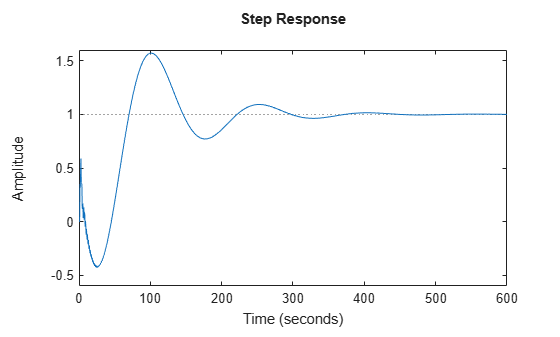
Cuando se simula la respuesta en lazo cerrado con el tamaño de paso predeterminado, la respuesta parece ser estable.
cl = feedback(sys,1); figure step(cl)
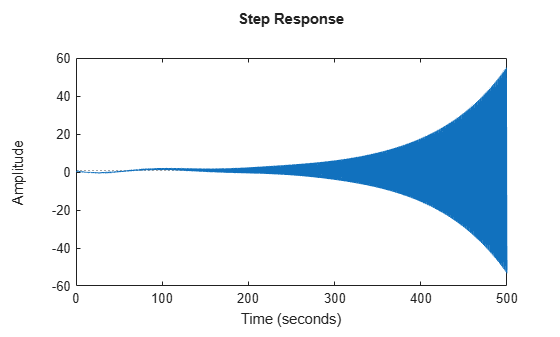
Sin embargo, cuando se reduce el tamaño de paso, la respuesta revela inestabilidad.
figure step(cl,0:1e-2:500)
Para valorar si el tamaño de paso de tiempo seleccionado es lo suficientemente pequeño, puede comparar la respuesta en frecuencia de los modelos continuo y discretizado con un tamaño de paso variable.
sysd1_cl = c2d(cl,0.4,'zoh');Warning: Discretization is only approximate due to internal delays. Use faster sampling rate if discretization error is large.
sysd2_cl = c2d(cl,0.01,'zoh');Warning: Discretization is only approximate due to internal delays. Use faster sampling rate if discretization error is large.
figure bodeplot(cl,sysd1_cl,sysd2_cl) legend("Continuous","Discrete (Ts = 0.4)","Discrete (Ts = 0.01)")
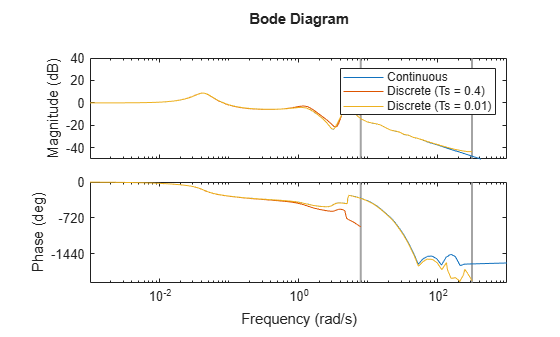
Un muestreo más lento no permite capturar la resonancia por completo. La simulación de modelos con retardos internos se basa en la discretización aproximada, de modo que debe validar si el tamaño de paso seleccionado es lo suficientemente pequeño comparando las respuestas continuas y discretas en el dominio de la frecuencia.
Argumentos de entrada
Argumentos de salida
Sugerencias
Para simular respuestas del sistema a señales de entrada arbitrarias, utilice
lsim.Cuando necesite opciones de personalización de gráficas adicionales, utilice en su lugar
stepplot.Las gráficas creadas con
stepno admiten títulos ni etiquetas multilínea especificados como arreglos de cadenas o arreglos de celdas de vectores de caracteres. Para especificar títulos y etiquetas multilínea, utilice una cadena única con un carácternewline.step(sys,u,t) title("first line" + newline + "second line");
Algoritmos
Para obtener muestras de modelos en tiempo continuo sin retardos internos, step convierte estos modelos en modelos en espacio de estados y los discretiza utilizando una retención de orden cero en las entradas. step elige automáticamente el tiempo de muestro para esta discretización en función de la dinámica del sistema, excepto cuando proporciona el vector de tiempo de entrada t en formato t = T0:dt:Tf. En ese caso, step utiliza dt como tiempo de muestreo. Las unidades de tiempo de simulación resultantes tOut se muestrean de forma equidistante con espaciamiento dt.
Para los sistemas con retardos internos, Control System Toolbox™ utiliza simulaciones basadas en la discretización de c2d aproximada. La precisión de la simulación mejora a medida que el tiempo de muestreo disminuye. Para ver un ejemplo, consulte Validate Simulation Results for Models with Internal Delays. (desde R2026a)
Referencias
[1] L.F. Shampine and P. Gahinet, "Delay-differential-algebraic equations in control theory," Applied Numerical Mathematics, Vol. 56, Issues 3–4, pp. 574–588.