surrogateopt
Surrogate optimization for global minimization of time-consuming objective functions
Syntax
Description
surrogateopt is a global solver for time-consuming
objective functions.
surrogateopt attempts to solve problems of the form
The solver searches for the global minimum of a real-valued objective function in
multiple dimensions, subject to bounds, optional linear constraints, optional integer
constraints, and optional nonlinear inequality constraints.
surrogateopt is best suited to objective functions that take a
long time to evaluate. The objective function can be nonsmooth. The solver requires
finite bounds on all variables. The solver can optionally maintain a checkpoint file to
enable recovery from crashes or partial execution, or optimization continuation after
meeting a stopping condition. The objective function
f(x) can be empty ([]), in
which case surrogateopt attempts to find a point satisfying all the
constraints.
x = surrogateopt(objconstr,lb,ub)objconstr(x) in the region
lb <= x <= ub. If objconstr(x)
returns a structure, then surrogateopt searches for a
minimum of objconstr(x).Fval, subject to
objconstr(x).Ineq <= 0.
Note
Passing Extra Parameters explains how to pass extra parameters to the objective function, if necessary.
x = surrogateopt(checkpointFile)
x = surrogateopt(checkpointFile,opts)checkpointFile with those in
opts. See Checkpoint File.
Examples
Search for a minimum of the six-hump camel back function in the region -2.1 <= x(i) <= 2.1. This function has two global minima with the objective function value -1.0316284... and four local minima with higher objective function values.
rng default % For reproducibility objconstr = @(x)(4*x(:,1).^2 - 2.1*x(:,1).^4 + x(:,1).^6/3 ... + x(:,1).*x(:,2) - 4*x(:,2).^2 + 4*x(:,2).^4); lb = [-2.1,-2.1]; ub = -lb; x = surrogateopt(objconstr,lb,ub)
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
x = 1×2
0.0898 -0.7131
Find the minimum of Rosenbrock's function
subject to the nonlinear constraint that the solution lies in a disk of radius 1/3 around the point [1/3,1/3]:
.
To do so, write a function objconstr(x) that returns the value of Rosenbrock's function in a structure field Fval, and returns the nonlinear constraint value in the form in the structure field Ineq.
type objconstrfunction f = objconstr(x) f.Fval = 100*(x(2) - x(1)^2)^2 + (1 - x(1))^2; f.Ineq = (x(1)-1/3)^2 + (x(2)-1/3)^2 - (1/3)^2;
Call surrogateopt using lower bounds of 0 and upper bounds of 2/3 on each component.
lb = [0,0]; ub = [2/3,2/3]; [x,fval,exitflag] = surrogateopt(@objconstr,lb,ub)
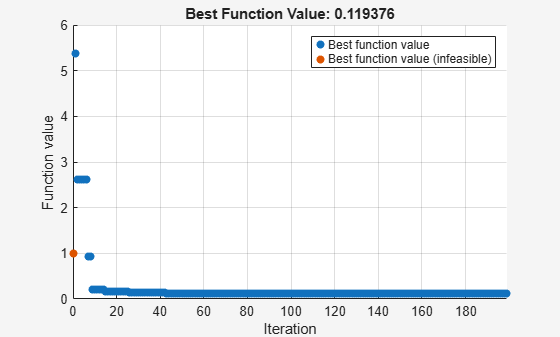
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
x = 1×2
0.6546 0.4277
fval = 0.1194
exitflag = 0
Check the value of the nonlinear constraint at the solution.
disp(objconstr(x).Ineq)
9.9334e-04
The constraint function value is near zero, indicating that the constraint is active at the solution.
Find the minimum of the ps_example function for a two-dimensional variable x whose first component is restricted to integer values, and all components are between –5 and 5.
intcon = 1; rng default % For reproducibility objconstr = @ps_example; lb = [-5,-5]; ub = [5,5]; x = surrogateopt(objconstr,lb,ub,intcon)
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
x = 1×2
-5.0000 0.0004
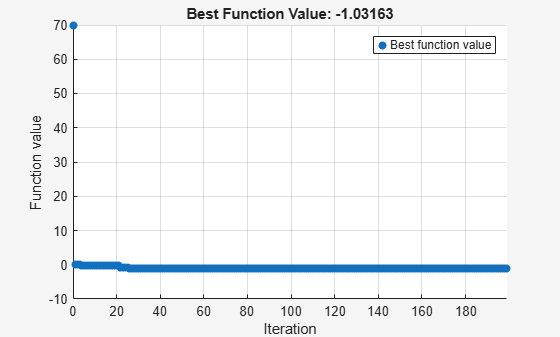
Minimize the six-hump camel back function in the region -2.1 <= x(i) <= 2.1. This function has two global minima with the objective function value -1.0316284... and four local minima with higher objective function values.
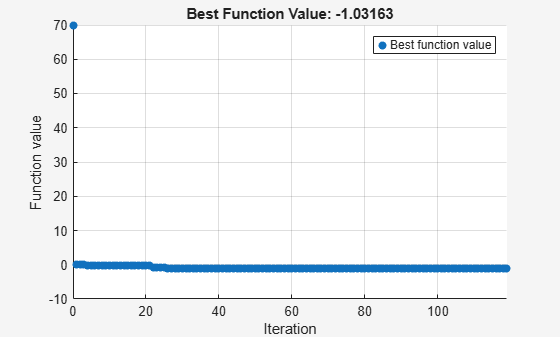
To search the region systematically, use a regular grid of starting points. Set 120 as the maximum number of function evaluations. Use the "surrogateoptplot" plot function. To understand the "surrogateoptplot" plot, see Interpret surrogateoptplot.
rng default % For reproducibility objconstr = @(x)(4*x(:,1).^2 - 2.1*x(:,1).^4 + x(:,1).^6/3 ... + x(:,1).*x(:,2) - 4*x(:,2).^2 + 4*x(:,2).^4); lb = [-2.1,-2.1]; ub = -lb; [Xpts,Ypts] = meshgrid(-3:3); startpts = [Xpts(:),Ypts(:)]; options = optimoptions("surrogateopt",PlotFcn="surrogateoptplot",... InitialPoints=startpts,MaxFunctionEvaluations=120); x = surrogateopt(objconstr,lb,ub,options)
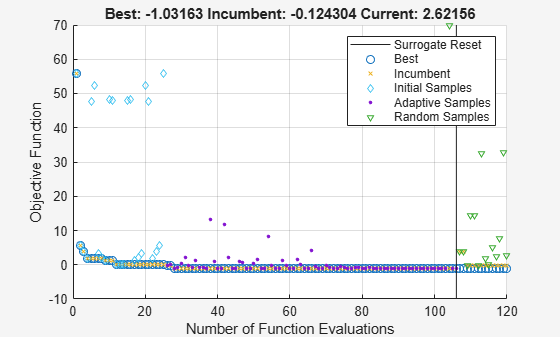
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
x = 1×2
0.0900 -0.7125
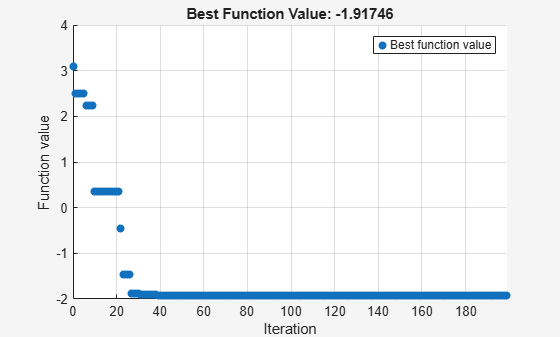
Minimize a nonlinear objective function subject to linear inequality constraints. Minimize for 200 function evaluations.
objconstr = @multirosenbrock; nvar = 6; lb = -2*ones(nvar,1); ub = -lb; intcon = []; A = ones(1,nvar); b = 3; Aeq = []; beq = []; options = optimoptions("surrogateopt",MaxFunctionEvaluations=200); [sol,fval,exitflag,output] = ... surrogateopt(objconstr,lb,ub,intcon,A,b,Aeq,beq,options)

surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
sol = 1×6
0.2072 0.0437 0.1360 0.0066 0.1196 -0.0002
fval = 2.1853
exitflag = 0
output = struct with fields:
elapsedtime: 10.5043
funccount: 200
constrviolation: 0
ineq: [1×0 double]
rngstate: [1×1 struct]
message: 'surrogateopt stopped because it exceeded the function evaluation limit set by ↵'options.MaxFunctionEvaluations'.'
Create a problem structure representing the six-hump camel back function in the region -2.1 <= x(i) <= 2.1. Set 120 as the maximum number of function evaluations.
rng default % For reproducibility objconstr = @(x)(4*x(:,1).^2 - 2.1*x(:,1).^4 + x(:,1).^6/3 ... + x(:,1).*x(:,2) - 4*x(:,2).^2 + 4*x(:,2).^4); options = optimoptions("surrogateopt",MaxFunctionEvaluations=120); problem = struct(objective=objconstr,... lb=[-2.1,-2.1],... ub=[2.1,2.1],... options=options,... solver="surrogateopt"); x = surrogateopt(problem)
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
x = 1×2
0.0898 -0.7131
Minimize the six-hump camel back function and return both the minimizing point and the objective function value. Set options to suppress all other display.
rng default % For reproducibility objconstr = @(x)(4*x(:,1).^2 - 2.1*x(:,1).^4 + x(:,1).^6/3 ... + x(:,1).*x(:,2) - 4*x(:,2).^2 + 4*x(:,2).^4); lb = [-2.1,-2.1]; ub = -lb; options = optimoptions("surrogateopt",Display="off",PlotFcn=[]); [x,fval] = surrogateopt(objconstr,lb,ub,options)
x = 1×2
0.0898 -0.7131
fval = -1.0316
Monitor the surrogate optimization process by requesting that surrogateopt return more outputs. Use the "surrogateoptplot" plot function. To understand the "surrogateoptplot" plot, see Interpret surrogateoptplot.
rng default % For reproducibility objconstr = @(x)(4*x(:,1).^2 - 2.1*x(:,1).^4 + x(:,1).^6/3 ... + x(:,1).*x(:,2) - 4*x(:,2).^2 + 4*x(:,2).^4); lb = [-2.1,-2.1]; ub = -lb; options = optimoptions("surrogateopt",PlotFcn="surrogateoptplot"); [x,fval,exitflag,output] = surrogateopt(objconstr,lb,ub,options)
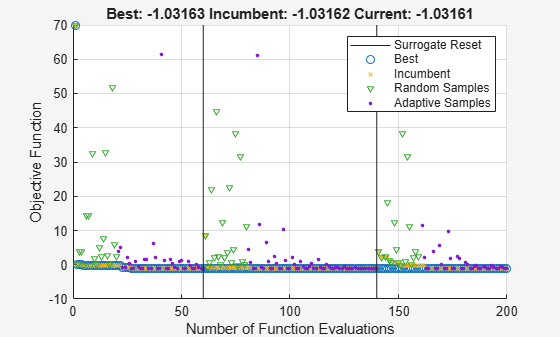
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
x = 1×2
0.0898 -0.7131
fval = -1.0316
exitflag = 0
output = struct with fields:
elapsedtime: 7.0570
funccount: 200
constrviolation: 0
ineq: [1×0 double]
rngstate: [1×1 struct]
message: 'surrogateopt stopped because it exceeded the function evaluation limit set by ↵'options.MaxFunctionEvaluations'.'
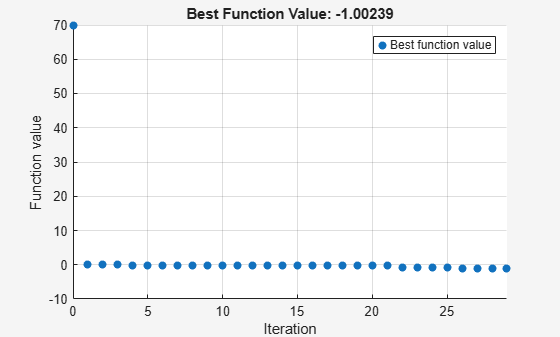
Conclude a surrogate optimization quickly by setting a small maximum number of function evaluations. To prepare for the possibility of restarting the optimization, request all solver outputs.
rng default % For reproducibility objconstr = @(x)(4*x(:,1).^2 - 2.1*x(:,1).^4 + x(:,1).^6/3 ... + x(:,1).*x(:,2) - 4*x(:,2).^2 + 4*x(:,2).^4); lb = [-2.1,-2.1]; ub = -lb; options = optimoptions("surrogateopt",MaxFunctionEvaluations=20); [x,fval,exitflag,output,trials] = surrogateopt(objconstr,lb,ub,options);
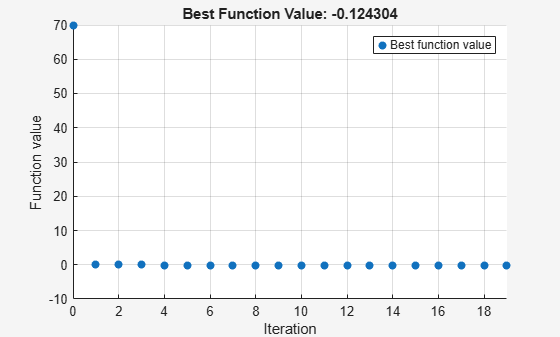
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
Optimize for another 20 function evaluations, starting from the previously evaluated points.
options.InitialPoints = trials; [x,fval,exitflag,output,trials] = surrogateopt(objconstr,lb,ub,options);
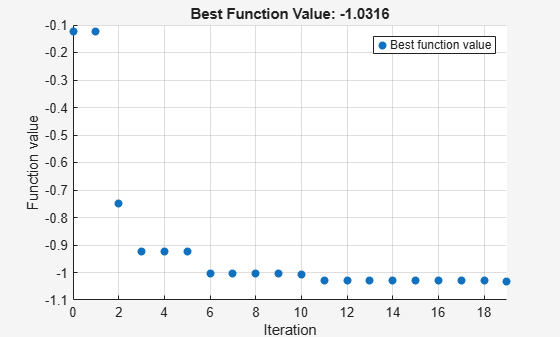
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
By comparing the plots of these 40 function evaluations to those in Search for Global Minimum, you see that restarting surrogate optimization is not the same as having the solver run continuously.
To enable restarting surrogate optimization due to a crash or any other reason, set a checkpoint file name.
opts = optimoptions("surrogateopt",CheckpointFile="checkfile.mat");
Create an optimization problem and set a small number of function evaluations.
rng default % For reproducibility objconstr = @(x)(4*x(:,1).^2 - 2.1*x(:,1).^4 + x(:,1).^6/3 ... + x(:,1).*x(:,2) - 4*x(:,2).^2 + 4*x(:,2).^4); lb = [-2.1,-2.1]; ub = -lb; opts.MaxFunctionEvaluations = 30; [x,fval,exitflag,output] = surrogateopt(objconstr,lb,ub,opts)
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
x = 1×2
-0.1394 0.7630
fval = -1.0024
exitflag = 0
output = struct with fields:
elapsedtime: 5.6603
funccount: 30
constrviolation: 0
ineq: [1×0 double]
rngstate: [1×1 struct]
message: 'surrogateopt stopped because it exceeded the function evaluation limit set by ↵'options.MaxFunctionEvaluations'.'
Set options to use 100 function evaluations (which means 70 more than already done) and restart the optimization.
opts.MaxFunctionEvaluations = 100;
[x2,fval2,exitflag2,output2] = surrogateopt("checkfile.mat",opts)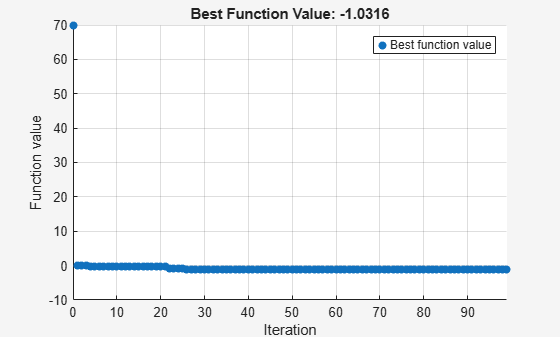
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
x2 = 1×2
-0.0925 0.7126
fval2 = -1.0316
exitflag2 = 0
output2 = struct with fields:
elapsedtime: 8.1855
funccount: 100
constrviolation: 0
ineq: [1×0 double]
rngstate: [1×1 struct]
message: 'surrogateopt stopped because it exceeded the function evaluation limit set by ↵'options.MaxFunctionEvaluations'.'
Input Arguments
Output Arguments
Algorithms
surrogateopt repeatedly performs these steps:
Create a set of trial points by sampling
MinSurrogatePointsrandom points within the bounds, and evaluate the objective function at the trial points.Create a surrogate model of the objective function by interpolating a radial basis function through all of the random trial points.
Create a merit function that gives some weight to the surrogate and some weight to the distance from the trial points. Locate a small value of the merit function by randomly sampling the merit function in a region around the incumbent point (best point found since the last surrogate reset). Use this point, called the adaptive point, as a new trial point.
Evaluate the objective at the adaptive point, and update the surrogate based on this point and its value. Count a "success" if the objective function value is sufficiently lower than the previous best (lowest) value observed, and count a "failure" otherwise.
Update the dispersion of the sample distribution upwards if three successes occur before
max(nvar,5)failures, wherenvaris the number of dimensions. Update the dispersion downwards ifmax(nvar,5)failures occur before three successes.Continue from step 3 until all trial points are within
MinSampleDistanceof the evaluated points. At that time, reset the surrogate by discarding all adaptive points from the surrogate, reset the scale, and go back to step 1 to createMinSurrogatePointsnew random trial points for evaluation.
For details, see Surrogate Optimization Algorithm.
Alternative Functionality
App
The Optimize Live Editor task provides a visual interface for surrogateopt.