bwtraceboundary
Trazar un objeto en una imagen binaria
Sintaxis
Descripción
B = bwtraceboundary(BW,P,fstep)BW. Los píxeles distintos de cero pertenecen a un objeto y los píxeles con valor cero conforman el fondo. P especifica las coordenadas de fila y de columna del punto sobre el límite del objeto donde usted desea comenzar el trazado. fstep especifica la dirección de búsqueda inicial del píxel del siguiente objeto conectado a P. B mantiene las coordenadas de fila y columna de los píxeles del límite de la región.
Ejemplos
Lea una imagen y muéstrela.
BW = imread('blobs.png');
imshow(BW)
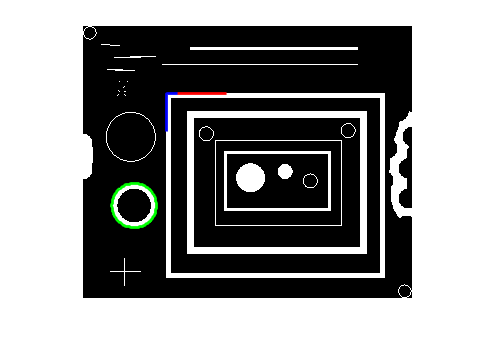
Elija un objeto en la imagen y trace el límite. Para seleccionar un objeto, especifique un píxel en su límite. Este ejemplo utiliza las coordenadas de un píxel del límite del círculo con línea blanca gruesa, obtenidas por inspección visual mediante impixelinfo. De forma predeterminada, bwtraceboundary identifica todos los píxeles del límite.
r1 = 163;
c1 = 37;
contour = bwtraceboundary(BW,[r1 c1],'W');Represente el límite en la imagen.
hold on plot(contour(:,2),contour(:,1),'g','LineWidth',2)

Elija un punto del límite de un segundo objeto. Este ejemplo usa las coordinadas de un píxel cerca de la esquina superior izquierda del rectángulo mayor. Trace los primeros cincuenta píxeles del límite en el sentido de las agujas del reloj.
r2 = 68; c2 = 95; contourCW = bwtraceboundary(BW,[r2 c2],'W',8,50,'clockwise');
Empezando en el mismo punto sobre el límite del segundo objeto, trace los primeros cincuenta píxeles del límite en el sentido contrario a las agujas del reloj.
contourCCW = bwtraceboundary(BW,[r2 c2],'W',8,50,'counterclockwise');
Represente el contorno de la imagen en rojo en el sentido de las agujas del reloj. Represente el contorno de la imagen en el sentido contrario a las agujas del reloj en azul.
plot(contourCW(:,2),contourCW(:,1),'r','LineWidth',2) plot(contourCCW(:,2),contourCCW(:,1),'b','LineWidth',2)
Argumentos de entrada
Imagen binaria, especificada como matriz lógica o numérica 2D.
Coordenadas del punto de partida en el límite del objeto donde usted desea empezar el trazado, especificado como un vector de 2 elementos del formato [row column].
Tipos de datos: double
Conectividad de píxeles, especificada como 8 o 4.
Valor | Significado | |
|---|---|---|
Conectividades bidimensionales | ||
| Los píxeles se consideran conectados si comparten bordes. El entorno de un píxel son los píxeles adyacentes en las direcciones horizontal y vertical. |
El píxel actual se muestra en gris. |
| Los píxeles se consideran conectados si comparten bordes o vértices. El entorno de un píxel son los píxeles adyacentes en las direcciones horizontal, vertical y diagonal. |
El píxel actual se muestra en gris. |


Tipos de datos: double
Número máximo de píxeles de límites que se desea extraer, especificado como un entero positivo. De forma predeterminada, m es Inf y bwtraceboundary identifica todos los píxeles del límite.
Tipos de datos: double
Dirección en la que trazar el límite, especificada como "clockwise" o "counterclockwise".
Tipos de datos: char | string
Argumentos de salida
Algoritmos
La función bwtraceboundary implementa el algoritmo de trazado de Moore-Neighbor, modificado por los criterios de detención de Jacob. Esta función se basa en la función boundaries presentada en la primera edición de Digital Image Processing Using MATLAB, de González, R. C., R. E. Woods, y S. L. Eddins, Nueva Jersey, Pearson Prentice Hall, 2004.
Referencias
[1] Gonzalez, R. C., R. E. Woods, and S. L. Eddins. Digital Image Processing Using MATLAB, New Jersey, Pearson Prentice Hall, 2004.