pcregisterloam
Syntax
Description
tform = pcregisterloam(movingPtCloud,fixedPtCloud,gridStep)movingPoints with the fixed point
cloud fixedPoints using the lidar odometry and mapping (LOAM)
algorithm. The function returns the rigid transformation tform, between
the moving and fixed point clouds. gridStep specifies the size of a
3-D box used to downsample the LOAM points detected in the input point clouds.
tform = pcregisterloam(movingPoints,fixedPoints)movingPoints with the fixed LOAM
points fixedPoints and returns the rigid transformation between them
tform. Using this function to register LOAM points is faster and more
accurate than using it to register point clouds.
You can obtain the LOAM points of the moving and fixed point clouds by using the
detectLOAMFeatures function, which detects LOAM feature points from organized
point clouds.
[___] = pcregisterloam(___,
specifies options using one or more name-value arguments in addition to any combination of
arguments from previous syntaxes. For example,
Name=Value)MatchingMethod='one-to-one' sets the matching method
algorithm to 'one-to-one'.
Examples
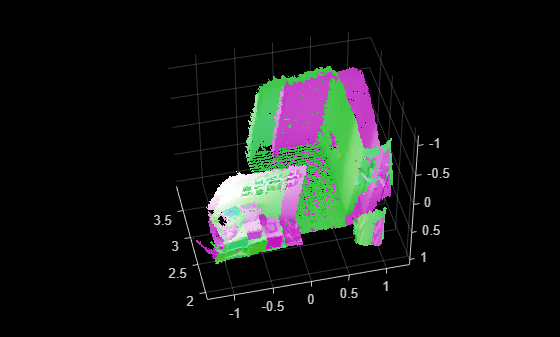
Load and visualize point cloud data.
ld = load('livingRoom.mat'); movingPtCloud = ld.livingRoomData{1}; fixedPtCloud = ld.livingRoomData{2}; figure pcshowpair(movingPtCloud,fixedPtCloud,'VerticalAxis','Y','VerticalAxisDir','Down')
Register the point clouds.
gridStep = 0.5; tform = pcregisterloam(movingPtCloud,fixedPtCloud,gridStep);
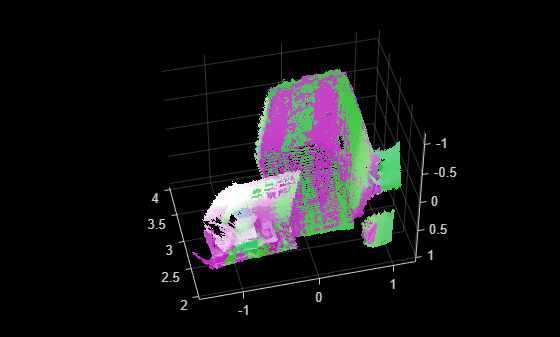
Align and visualize the point clouds.
alignedPtCloud = pctransform(movingPtCloud, tform); figure pcshowpair(alignedPtCloud,fixedPtCloud,'VerticalAxis','Y','VerticalAxisDir','Down')
Read point cloud data from a Velodyne PCAP file into the workspace.
veloReader = velodyneFileReader("lidarData_ConstructionRoad.pcap","HDL32E");
Read the first point cloud from the data. Use this point cloud as the fixed point cloud.
fixedPtCloud = readFrame(veloReader,1);
Detect LOAM feature points in the fixed point cloud.
fixedPoints = detectLOAMFeatures(fixedPtCloud);
Downsample the less planar surface points from the fixed point cloud, to improve registration speed.
gridStep = 1; fixedPoints = downsampleLessPlanar(fixedPoints,gridStep);
Read and detect LOAM feature points from the fifth point cloud in the data. Use this point cloud as the moving point cloud.
movingPtCloud = readFrame(veloReader,5); movingPoints = detectLOAMFeatures(movingPtCloud);
Downsample the less planar surface points from the moving point cloud.
movingPoints = downsampleLessPlanar(movingPoints,gridStep);
Register the moving point cloud to the fixed point cloud.
tform = pcregisterloam(movingPoints,fixedPoints);
Transform the moving point cloud to align it to the fixed point cloud.
alignedPtCloud = pctransform(movingPtCloud,tform);
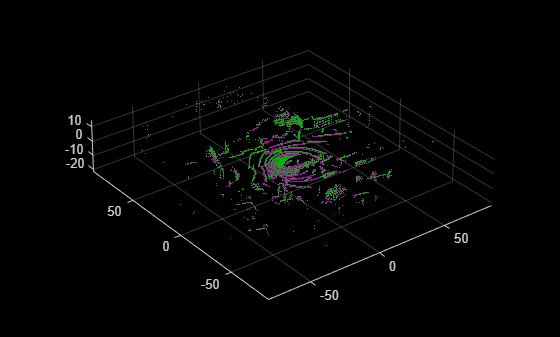
Visualize the aligned point clouds. Points from the fixed point cloud display as green, while points from the moving point cloud display as magenta.
figure pcshowpair(alignedPtCloud,fixedPtCloud)
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Zhang, Ji, and Sanjiv Singh. “LOAM: Lidar Odometry and Mapping in Real-Time.” In Robotics: Science and Systems X. Robotics: Science and Systems Foundation, 2014. https://doi.org/10.15607/RSS.2014.X.007.