move
Move Parrot drone in all six directions
Description
Add-On Required: This feature requires the MATLAB Support Package for Parrot Drones add-on.
move(
moves the Parrot® drone, represented by parrotObj,Name,Value)parrotObj, in all six directions
based on attitude angles, rotation speed, and vertical speed specified as
Name,Value pair arguments.
The following schematic shows the quadcopter axis characteristics :
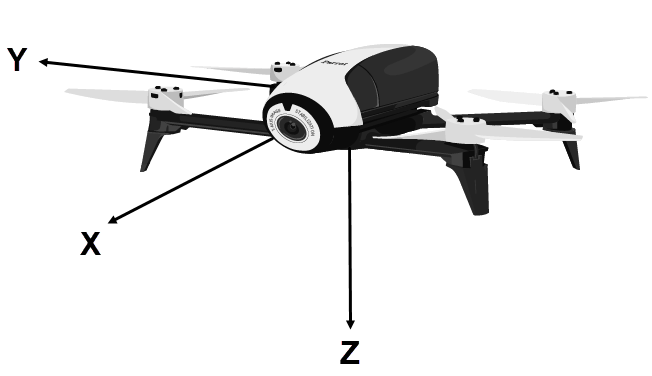
The quadcopter body axis is centered in the center of gravity.
The x-axis starts at the center of gravity and points in the direction along the nose of the quadcopter.
The y-axis starts at the center of gravity and points to the right of the quadcopter.
The z-axis starts at the center of gravity and points downward from the quadcopter, following the right-hand rule.
move(
moves the Parrot drone, represented by parrotObj,duration,Name,Value)parrotObj, in all six directions
based on attitude angles, rotation speed, and vertical speed specified as
Name,Value pair arguments for the duration specified as
duration.
Examples
Input Arguments
Name-Value Arguments
Version History
Introduced in R2019a