boustrophedonOptions
Opciones para el algoritmo de descomposición de polígonos de bustrofedona
Desde R2025a
Descripción
El objeto boustrophedonOptions define el comportamiento de la descomposición de polígonos utilizando el algoritmo boustrophedon y le permite generar un gráfico de conectividad de celdas de polígonos después de la descomposición. Especifique este objeto en la función polygonDecomposition para realizar la descomposición utilizando el algoritmo de descomposición de bustrofedón con las opciones especificadas [1].
Creación
Descripción
options = boustrophedonOptions genera un objeto de opciones de descomposición de polígonos con propiedades predeterminadas. Especifique este objeto en la función polygonDecomposition para realizar la descomposición utilizando el algoritmo de descomposición de bustrofedón con las opciones especificadas.
options = boustrophedonOptions( establece una o más propiedades para PropertyName=Value)options usando argumentos de nombre-valor.
Propiedades
Ejemplos
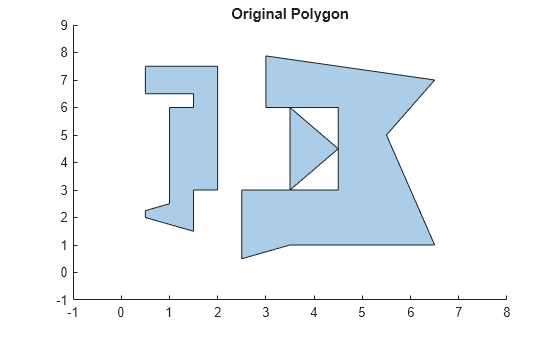
Cargue un polyshape y grafíquelo.
load("exampleComplexPolyshape.mat","p") plot(p) title("Original Polygon")
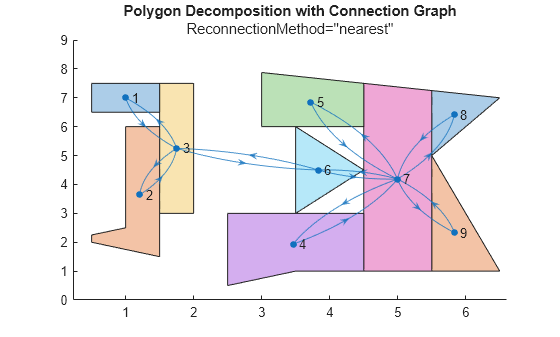
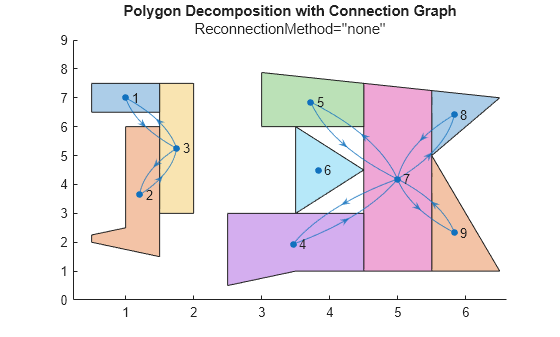
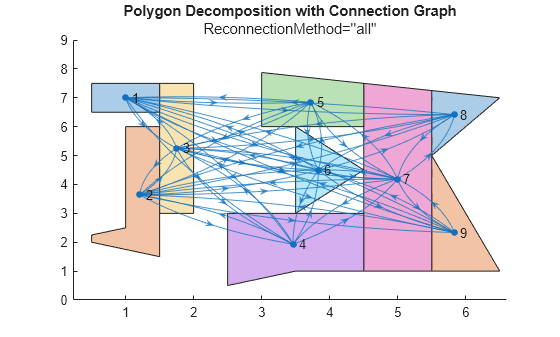
Descomponga el polígono utilizando cada método de reconexión.
bOpts1 = boustrophedonOptions(ReconnectionMethod="nearest"); [polySet1,info1] = polygonDecomposition(p,bOpts1); bOpts2 = boustrophedonOptions(ReconnectionMethod="none"); [polySet2,info2] = polygonDecomposition(p,bOpts2); bOpts3 = boustrophedonOptions(ReconnectionMethod="all"); [polySet3,info3] = polygonDecomposition(p,bOpts3);
Muestre la descomposición poligonal con una superposición de gráfico de conectividad para cada método de reconexión.
plot(polySet1) hold on exampleHelperShowGraphConnectionsOnPolyset(polySet1,info1.Connectivity,0.5); title("Polygon Decomposition with Connection Graph"); subtitle("ReconnectionMethod=''nearest''") hold off
plot(polySet2) hold on exampleHelperShowGraphConnectionsOnPolyset(polySet2,info2.Connectivity,0.5); title("Polygon Decomposition with Connection Graph"); subtitle("ReconnectionMethod=''none''"); hold off
plot(polySet3) hold on exampleHelperShowGraphConnectionsOnPolyset(polySet3,info3.Connectivity,0.5); title("Polygon Decomposition with Connection Graph"); subtitle("ReconnectionMethod=''all''"); hold off
Esta es la función auxiliar para trazar la descomposición del polígono y superponer el gráfico de conectividad.
function gHandle = exampleHelperShowGraphConnectionsOnPolyset(polySet,connectionGraph,lineWidth) % Get the current axes ax = gca; ax.ColorOrderIndex = 1; % Reset the color order index % Overlay the connectivity graph gHandle = show(connectionGraph); gHandle.EdgeAlpha = 0.75; gHandle.LineWidth = lineWidth; % Set the line width for the graph edges % Calculate and plot the centroids [cx,cy] = centroid(polySet); % Set the xy-positions of the connectivity graph to the centroids of % the polygons gHandle.XData = cx'; gHandle.YData = cy'; end
Cargue un polígono rectangular con múltiples agujeros como un objeto polyshape.
load("exampleRectangleWithHolesPolyshape.mat","p")
Defina una función de costo conectada que utilice datos del terreno y asigne costos a los bordes en función de la magnitud del cambio de pendiente.
function cost = terrainConnectedCostFcn(polySet,i,J,userData) arguments polySet {mustBeA(polySet,{'polyshape','nav.decomp.internal.polyshapeMgr'})} i (1,1) {mustBeInteger,mustBePositive} J (:,1) {mustBeInteger,mustBePositive} userData (1,1) struct end % Extract dx, dy, and the coordinate bounds from userData dx = userData.XSlope; dy = userData.YSlope; xBounds = userData.XBounds; yBounds = userData.YBounds; % Calculate the slope magnitude slope_magnitude = sqrt(dx.^2 + dy.^2); % Define the coordinates for the slope map based on the provided bounds x = linspace(xBounds(1),xBounds(2),size(slope_magnitude,1)); y = linspace(yBounds(1),yBounds(2),size(slope_magnitude,2)); % Initialize the cost array cost = zeros(size(J)); % Calculate the average slope for the starting polyshape avgSlope_i = calculateAverageSlope(polySet(i),slope_magnitude,x,y); for idx = 1:numel(J) % Calculate the average slope for each target polyshape avgSlope_j = calculateAverageSlope(polySet(J(idx)),slope_magnitude,x,y); % Define a cost function that includes the average slope difference % For example, prioritize smaller slope differences cost(idx) = abs(avgSlope_i-avgSlope_j); end end function avgSlope = calculateAverageSlope(poly,slope_magnitude,x,y) % Find the bounding box of the polyshape [x_lim,y_lim] = boundingbox(poly); % Determine the indices in the slope map that correspond to this % polyshape x_indices = find(x >= x_lim(1) & x <= x_lim(2)); y_indices = find(y >= y_lim(1) & y <= y_lim(2)); % Extract the relevant portion of the slope map slopesInPoly = slope_magnitude(y_indices,x_indices); % Compute the average slope for the polyshape avgSlope = mean(slopesInPoly(:)); end
Defina datos personalizados para las funciones de costo a utilizar. Crea una membrana L para representar el terreno y calcula la pendiente en cada punto.
Z = membrane(1,3); [dx,dy] = gradient(Z);
Almacene los datos de pendiente y límites en una estructura.
terrainData.XSlope = dx; terrainData.YSlope = dy; terrainData.XBounds = [1 8]; terrainData.YBounds = [1 8];
Cree un objeto de opciones de bustrofedón y especifique la función de costo conectada personalizada y los datos del terreno.
bOpts = boustrophedonOptions(ConnectedCostFcn="terrainConnectedCostFcn",UserData=terrainData);Descomponga el polígono y grafique el conjunto de polígonos resultantes.
[polySet,info] = polygonDecomposition(p,bOpts); plot(polySet) axis equal hold on
Superponga el gráfico de conectividad y resalte los bordes para mostrar los costos de borde entre los polígonos descompuestos. Tenga en cuenta que el pico de la membrana L está alrededor de los polígonos 8, 11 y 13, por lo que los bordes que conectan estos polígonos con los polígonos en la parte superior izquierda tienen un costo de borde mayor.
gHandle = exampleHelperShowGraphConnectionsOnPolyset(polySet,info.Connectivity,2);
exampleHelperVisualizeConnectionGraphWeights(info.Connectivity,gHandle);
title("Connection Graph with Cost Visualized")
customLinkInfo = info.Connectivity.LinkscustomLinkInfo=44×2 table
EndStates Weight
_________ ________
1 2 0.090406
1 3 0.026001
1 4 0.27418
2 1 0.090406
2 5 0
3 1 0.026001
3 5 0.11641
3 6 0.29335
4 1 0.27418
4 6 0.04517
5 2 0
5 3 0.11641
5 7 0.062287
5 8 0.4142
6 3 0.29335
6 4 0.04517
⋮
hold off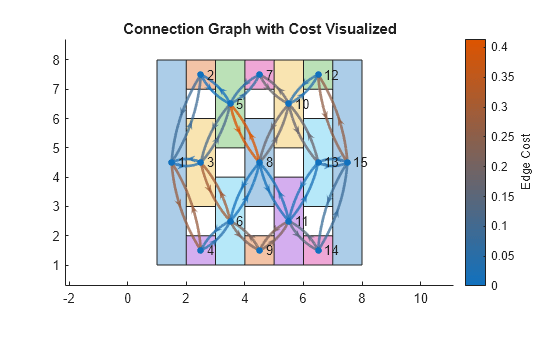
Cargar un polyshape complejo.
load exampleComplexPolyshape.matDefina una función de costo desconectada personalizada que priorice la reconexión de los polígonos desconectados utilizando el borde más largo posible.
function cost = longEdgeDisconnectedCostFcn(polySet,i,J,userData) arguments polySet {mustBeA(polySet,{'polyshape','nav.decomp.internal.polyshapeMgr'})} i (1,1) {mustBeInteger,mustBePositive} J (:,1) {mustBeInteger,mustBePositive} userData (1,1) struct %#ok<INUSA> end c1 = [0 0]; c2 = zeros(numel(J),2); % Calculate the centroid of the current polygon [c1(1),c1(2)] = polySet(i).centroid; % Get the centroids of possible polygons connections for i = 1:numel(J) [c2(i,1),c2(i,2)] = polySet(J(i)).centroid; end % Calculate the centroid distances between the current polygon and % other polygons distances = vecnorm(c2-c1,2,2); % Calculate the inverse distance cost. Add a small number to avoid % division by zero cost = 1./(distances + 1e-6); end
Cree un objeto de opciones de descomposición de polígonos de bustrofedona y especifique la función de costo desconectada.
bOpts = boustrophedonOptions(DisconnectedCostFcn="longEdgeDisconnectedCostFcn", ... ReconnectionMethod="nearest");
Descomponga el polígono y visualice la conexión gráfica.
[polySet,info] = polygonDecomposition(p,bOpts);
plot(polySet)
hold on
gHandle = exampleHelperShowGraphConnectionsOnPolyset(polySet,info.Connectivity,0.5);
info.Connectivity.Linksans=16×2 table
EndStates Weight
_________ _______
1 3 0
1 6 0.26465
1 9 0.14884
2 3 0
3 1 0
3 2 0
4 7 0
5 7 0
6 1 0.26465
7 4 0
7 5 0
7 8 0
7 9 0
8 7 0
9 1 0.14884
9 7 0
c = colororder;
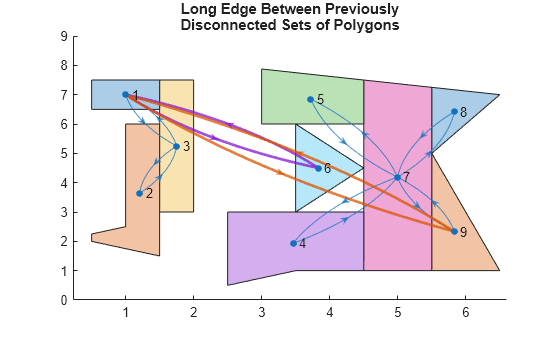
Resalte los bordes entre los conjuntos de polígonos previamente desconectados. Nótese que el polígono 6 también está desconectado, porque no comparte ningún borde aunque sus vértices están en contacto con otros bordes.
highlight(gHandle,Edges=[3 15],EdgeColor=c(2,:),LineWidth=2) % Edge from Polygon 1 to Polygon 9 highlight(gHandle,Edges=[2 9],EdgeColor=c(4,:),LineWidth=2) % Edge from Polygon 1 to Polygon 6 title(["Long Edge Between Previously","Disconnected Sets of Polygons"]) hold off
Referencias
[1] Choset, Howie. "Coverage of Known Spaces: The Boustrophedon Cellular Decomposition." Autonomous Robots 9 no. 3, (2000): 247–53. https://doi.org/10.1023/A:1008958800904.
Capacidades ampliadas
Historial de versiones
Introducido en R2025a