navGraph
Descripción
El objeto navGraph es una estructura de datos gráficos para Navigation Toolbox™ que ayuda a los planificadores basados en búsquedas.
El objeto navGraph le permite crear un gráfico y realizar cálculos en él. El objeto navGraph admite funcionalidades que los algoritmos de búsqueda de gráficos utilizan frecuentemente. Puede implementar fácilmente Dijkstra, A* o variantes utilizando navGraph.
En teoría de grafos, los estados representan nodos y los enlaces representan aristas. Los estados y enlaces están representados por su índice de fila correspondiente en la tabla. navGraph es un gráfico dirigido que actualmente admite nombres únicos, sin bucles propios en los bordes.
Creación
Sintaxis
Descripción
graph = navGraphnavGraph vacío, graph. Agregue estados y enlaces mediante las Funciones de objeto.
graph = navGraph(___,Name=Value)Name y Weight además del argumento de la sintaxis anterior.
graph = navGraph(stateTable,linkTable)navGraph con la tabla de estado y la tabla de vínculo especificadas, que contienen los metadatos del gráfico. Las entradas stateTable y linkTable establecen el valor de las propiedades States y Links, respectivamente.
graph = navGraph(___,Name=Value)LinkWeightFcn además de los argumentos de las sintaxis anteriores.
Argumentos de entrada
Argumentos de par nombre-valor
Propiedades
Funciones del objeto
addstate | Agregar uno o más estados al gráfico |
addlink | Agregar enlaces entre uno o más pares de estados |
rmstate | Eliminar uno o más estados del gráfico |
rmlink | Eliminar vínculos entre uno o más pares de estados |
findlink | Buscar ID de enlaces |
findstate | Encuentra identificaciones de estados |
index2state | Encontrar vectores de estado de índices estatales |
state2index | Buscar índices para vectores de estado consultados |
successors | Encuentre índices y costes estatales sucesivos. |
show | Trazar representación gráfica |
copy | Crear una copia profunda del objeto navGraph |
Ejemplos
Cargar datos para estados y enlaces.
load navGraphData.matCrear tablas de estados y enlaces.
stateTable = table(data.states,data.names,data.numLanes, ... VariableNames=["StateVector","Name","Lanes"]); linkTable = table(data.links,data.linkWt,data.curvature, ... VariableNames=["EndStates","Weight","Curvature"]);
Crea un objeto navGraph a partir de las tablas de estado y vínculo.
graphObj = navGraph(stateTable,linkTable);
Crea una copia profunda del objeto navGraph.
graph2 = copy(graphObj)
graph2 =
navGraph with properties:
States: [8×3 table]
Links: [7×3 table]
LinkWeightFcn: @nav.algs.distanceEuclidean
Visualice el objeto navGraph.
show(graphObj)
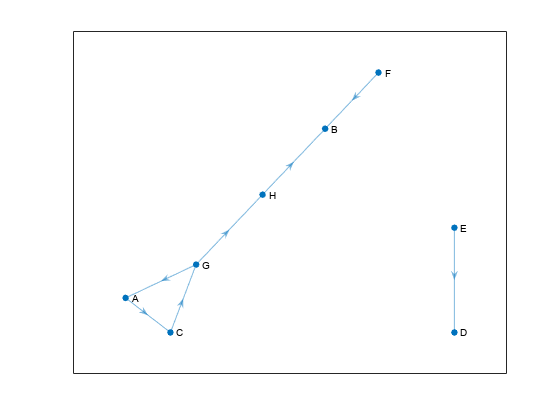
Encuentre los ID de enlace de dos pares de estados. La función devuelve el ID del enlace para el par de estados ["G","A"]. Sin embargo, devuelve 0 como ID de enlace para el par de estados ["C","D"] ya que el enlace no existe en el objeto navGraph.
linkIDS = findlink(navGraphObj,["G","A"; "C","D"])
linkIDS = 2×1
5
0
Capacidades ampliadas
Historial de versiones
Introducido en R2023aConsulte también
Objetos
Funciones
findlink|findstate|index2state|state2index|successors|show|copy|addstate|addlink|rmstate|rmlink