polygonDecomposition
Sintaxis
Descripción
polySet = polygonDecomposition(poly)
[___, también especifica las opciones del algoritmo de descomposición y devuelve cualquier combinación de argumentos de salida de sintaxis anteriores. Para devolver un gráfico de conectividad de los polígonos no superpuestos de la descomposición como un campo en el argumento de salida solnInfo] = polygonDecomposition(poly,options)solnInfo, la propiedad ReturnConnectivity de options debe ser true o 1.
Ejemplos
Cargue los vértices del polígono y utilice los vértices para crear un objeto polyshape.
load("exampleSimplePolygonVertices.mat","verticesX","verticesY") p = polyshape(verticesX,verticesY);
Realice la descomposición de polígonos con el algoritmo y las opciones predeterminadas.
polySet = polygonDecomposition(p);
Traza el polígono original y el polígono descompuesto uno al lado del otro.
tiledlayout(1,2,TileSpacing="loose") nexttile plot(p) title(["Original Polygon","Containing Concave Hole"]) nexttile plot(polySet) title(["Nonoverlapping","Decomposed Polygons"])

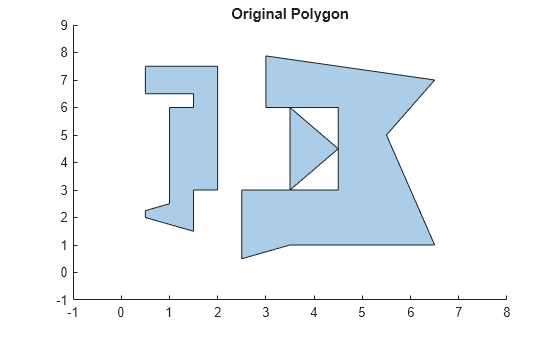
Cargue un polyshape y grafíquelo.
load("exampleComplexPolyshape.mat","p") plot(p) title("Original Polygon")
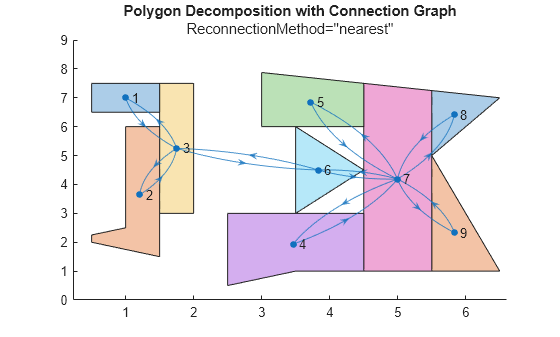
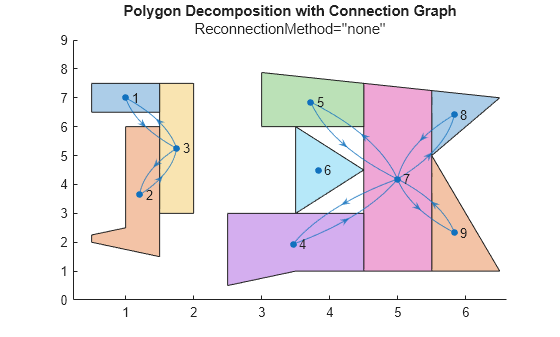
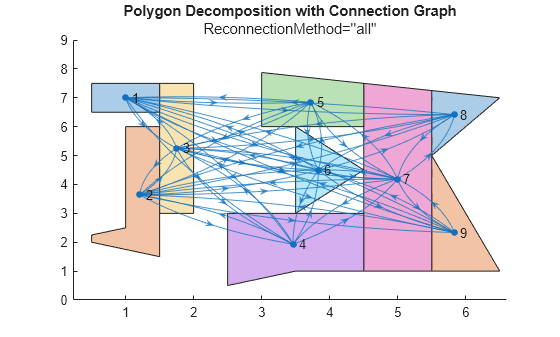
Descomponga el polígono utilizando cada método de reconexión.
bOpts1 = boustrophedonOptions(ReconnectionMethod="nearest"); [polySet1,info1] = polygonDecomposition(p,bOpts1); bOpts2 = boustrophedonOptions(ReconnectionMethod="none"); [polySet2,info2] = polygonDecomposition(p,bOpts2); bOpts3 = boustrophedonOptions(ReconnectionMethod="all"); [polySet3,info3] = polygonDecomposition(p,bOpts3);
Muestre la descomposición poligonal con una superposición de gráfico de conectividad para cada método de reconexión.
plot(polySet1) hold on exampleHelperShowGraphConnectionsOnPolyset(polySet1,info1.Connectivity,0.5); title("Polygon Decomposition with Connection Graph"); subtitle("ReconnectionMethod=''nearest''") hold off
plot(polySet2) hold on exampleHelperShowGraphConnectionsOnPolyset(polySet2,info2.Connectivity,0.5); title("Polygon Decomposition with Connection Graph"); subtitle("ReconnectionMethod=''none''"); hold off
plot(polySet3) hold on exampleHelperShowGraphConnectionsOnPolyset(polySet3,info3.Connectivity,0.5); title("Polygon Decomposition with Connection Graph"); subtitle("ReconnectionMethod=''all''"); hold off
Esta es la función auxiliar para trazar la descomposición del polígono y superponer el gráfico de conectividad.
function gHandle = exampleHelperShowGraphConnectionsOnPolyset(polySet,connectionGraph,lineWidth) % Get the current axes ax = gca; ax.ColorOrderIndex = 1; % Reset the color order index % Overlay the connectivity graph gHandle = show(connectionGraph); gHandle.EdgeAlpha = 0.75; gHandle.LineWidth = lineWidth; % Set the line width for the graph edges % Calculate and plot the centroids [cx,cy] = centroid(polySet); % Set the xy-positions of the connectivity graph to the centroids of % the polygons gHandle.XData = cx'; gHandle.YData = cy'; end
La función polygonDecomposition le permite planificar rutas de cobertura de UAV teniendo en cuenta las áreas que no necesita incluir en las rutas de cobertura.
Primero, cargue el polígono como un polyshape que representa la región a inspeccionar y descomponga el polígono en polígonos convexos no superpuestos.
load("exampleCoveragePlanningPolyshape.mat","p") polySet = polygonDecomposition(p);
Extraiga los vértices de cada polígono descompuesto y almacénelos en un arreglo de celdas.
polygonVertices = cell(numel(polySet),1); for i = 1:numel(polySet) polygonVertices{i} = polySet(i).Vertices; end
Cree un objeto uavCoverageSpace con los vértices del polígono descompuesto y visualice el espacio de cobertura.
space = uavCoverageSpace(Polygons=polygonVertices); ax = show(space,FontSize=1,LineWidth=0.25); title("UAV Coverage Space"); axis padded
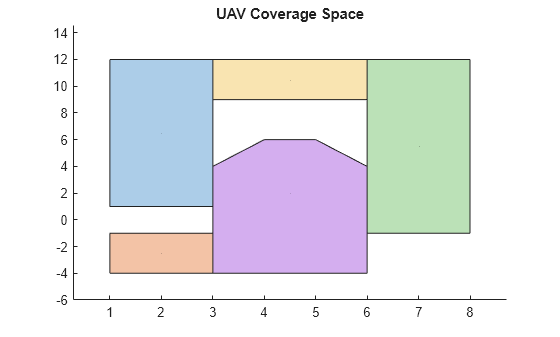
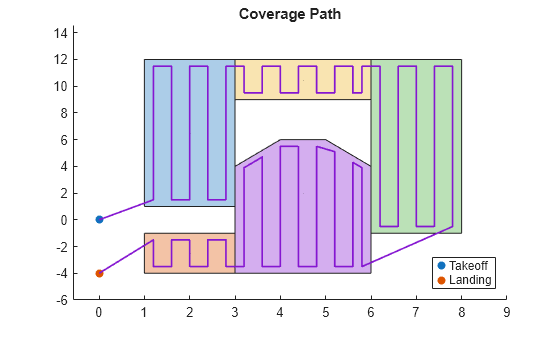
space.UnitWidth = 0.4; % Sensor footprint widthCree un objeto uavCoveragePlanner. Especifique las posiciones de despegue y aterrizaje y luego planifique la ruta de cobertura.
planner = uavCoveragePlanner(space); takeoff = [0 0 0]; landing = [0 -4 0]; path = plan(planner,takeoff,landing);
Visualice la ruta planificada en el espacio de cobertura.
hold on ax.ColorOrderIndex=1; h1 = scatter(takeoff(1),takeoff(2),"filled"); h2 = scatter(landing(1),landing(2),"filled");
Trazar la ruta de cobertura planificada.
ax.ColorOrderIndex=4; plot(path(:,1),path(:,2),LineWidth=1.25) legend([h1 h2],"Takeoff","Landing",Location="southeast") title("Coverage Path") hold off
Argumentos de entrada
Argumentos de salida
Referencias
[1] Choset, Howie. "Coverage of Known Spaces: The Boustrophedon Cellular Decomposition." Autonomous Robots 9, no.3 (2000): 247–53. https://doi.org/10.1023/A:1008958800904.
Capacidades ampliadas
Historial de versiones
Introducido en R2025a