ahrsfilter
Orientación a partir de lecturas de acelerómetro, giroscopio y magnetómetro
Descripción
ahrsfilter System object™ fusiona datos del sensor acelerómetro, magnetómetro y giroscopio para estimar la orientación del dispositivo.
Para estimar la orientación del dispositivo:
Cree el objeto
ahrsfiltery configure sus propiedades.Llame al objeto con argumentos, como si fuera una función.
Para más información sobre el funcionamiento de los System objects, consulte ¿Qué son los System Objects?
Creación
Descripción
FUSE = ahrsfilterFUSE, para la fusión de datos del sensor del acelerómetro, giroscopio y magnetómetro para estimar la orientación y la velocidad angular del dispositivo. El filtro utiliza un vector de estado de 12 elementos para rastrear el error de estimación de la orientación, el sesgo del giroscopio, la aceleración lineal y la perturbación magnética.
FUSE = ahrsfilter('ReferenceFrame',RF)ahrsfilter System object que fusiona datos del acelerómetro, giroscopio y magnetómetro para estimar la orientación del dispositivo en relación con el marco de referencia RF.
FUSE = ahrsfilter(___,Name=Value)
Argumentos de entrada
Propiedades
Uso
Descripción
[ fusiona datos del acelerómetro, giroscopio y magnetómetro para calcular mediciones de orientación y velocidad angular. El algoritmo supone que el dispositivo está parado antes de la primera llamada.orientation,angularVelocity,interData] = FUSE(accelReadings,gyroReadings,magReadings)
Argumentos de entrada
Argumentos de salida
Funciones del objeto
Para usar una función de objeto, especifique el System object como el primer argumento de entrada. Por ejemplo, para liberar recursos de sistema de un System object llamado obj, utilice la siguiente sintaxis:
release(obj)
Ejemplos
Cargue el archivo rpy_9axis, que contiene datos registrados de los sensores acelerómetro, giroscopio y magnetómetro de un dispositivo que oscila en cabeceo (alrededor del eje y), luego en guiñada (alrededor del eje z) y luego en balanceo (alrededor del eje x). El archivo también contiene la frecuencia de muestreo de la grabación.
load 'rpy_9axis' sensorData Fs accelerometerReadings = sensorData.Acceleration; gyroscopeReadings = sensorData.AngularVelocity; magnetometerReadings = sensorData.MagneticField;
Cree un ahrsfilter System object ™ con SampleRate establecido en la frecuencia de muestreo de los datos del sensor. Especifique un factor de diezmado de dos para reducir el coste computacional del algoritmo.
decim = 2; fuse = ahrsfilter('SampleRate',Fs,'DecimationFactor',decim);
Pase las lecturas del acelerómetro, del giroscopio y del magnetómetro al objeto ahrsfilter, fuse, para generar una estimación de la orientación del cuerpo del sensor a lo largo del tiempo. De forma predeterminada, la orientación se genera como un vector de cuaterniones.
q = fuse(accelerometerReadings,gyroscopeReadings,magnetometerReadings);
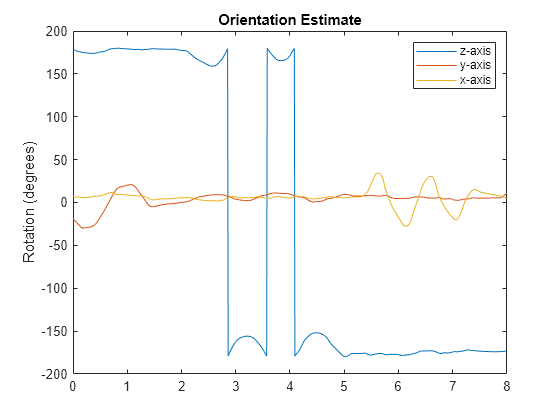
La orientación se define por el desplazamiento angular requerido para rotar un sistema de coordenadas principal a un sistema de coordenadas secundario. Trazar la orientación en ángulos de Euler en grados a lo largo del tiempo.
ahrsfilter estima correctamente el cambio de orientación a lo largo del tiempo, incluida la orientación inicial orientada al sur.
time = (0:decim:size(accelerometerReadings,1)-1)/Fs; plot(time,eulerd(q,'ZYX','frame')) title('Orientation Estimate') legend('z-axis', 'y-axis', 'x-axis') ylabel('Rotation (degrees)')
Este ejemplo muestra cómo el rendimiento del ahrsfilter System object™ se ve afectado por el bloqueo magnético.
Cargue StationaryIMUReadings, que contiene lecturas del acelerómetro, magnetómetro y giroscopio de una IMU estacionaria.
load 'StationaryIMUReadings.mat' accelReadings magReadings gyroReadings SampleRate numSamples = size(accelReadings,1);
El ahrsfilter utiliza la intensidad del campo magnético para estabilizar su orientación frente al supuesto campo magnético constante de la Tierra. Sin embargo, hay muchos objetos naturales y artificiales que generan campos magnéticos y pueden confundir el algoritmo. Para tener en cuenta la presencia de campos magnéticos transitorios, puede establecer la propiedad MagneticDisturbanceNoise en el objeto ahrsfilter.
Cree un objeto ahrsfilter con el factor de diezmado establecido en 2 y anote la intensidad del campo magnético esperada predeterminada.
decim = 2; FUSE = ahrsfilter('SampleRate',SampleRate,'DecimationFactor',decim);
Fusione las lecturas de la IMU utilizando el filtro del sistema de referencia de actitud y rumbo (AHRS) y luego visualice la orientación del cuerpo del sensor a lo largo del tiempo. La orientación fluctúa al principio y se estabiliza después de aproximadamente 60 segundos.
orientation = FUSE(accelReadings,gyroReadings,magReadings); orientationEulerAngles = eulerd(orientation,'ZYX','frame'); time = (0:decim:(numSamples-1))'/SampleRate; figure(1) plot(time,orientationEulerAngles(:,1), ... time,orientationEulerAngles(:,2), ... time,orientationEulerAngles(:,3)) xlabel('Time (s)') ylabel('Rotation (degrees)') legend('z-axis','y-axis','x-axis') title('Filtered IMU Data')

Imite la interferencia magnética añadiendo un campo magnético transitorio y fuerte al campo magnético registrado en magReadings. Visualice el campo magnético interfiriéndose.
jamStrength = [10,5,2]; startStop = (50*SampleRate):(150*SampleRate); jam = zeros(size(magReadings)); jam(startStop,:) = jamStrength.*ones(numel(startStop),3); magReadings = magReadings + jam; figure(2) plot(time,magReadings(1:decim:end,:)) xlabel('Time (s)') ylabel('Magnetic Field Strength (\mu T)') title('Simulated Magnetic Field with Jamming') legend('z-axis','y-axis','x-axis')

Ejecute la simulación nuevamente utilizando magReadings con interferencia magnética. Trace los resultados y observe la disminución del rendimiento en la estimación de la orientación.
reset(FUSE) orientation = FUSE(accelReadings,gyroReadings,magReadings); orientationEulerAngles = eulerd(orientation,'ZYX','frame'); figure(3) plot(time,orientationEulerAngles(:,1), ... time,orientationEulerAngles(:,2), ... time,orientationEulerAngles(:,3)) xlabel('Time (s)') ylabel('Rotation (degrees)') legend('z-axis','y-axis','x-axis') title('Filtered IMU Data with Magnetic Disturbance and Default Properties')

El filtro AHRS malinterpretó la interferencia magnética y la orientación del cuerpo del sensor se estimó incorrectamente. Puedes compensar el atasco aumentando la propiedad MagneticDisturbanceNoise. Al aumentar la propiedad MagneticDisturbanceNoise aumenta el rango de ruido asumido para la perturbación magnética, y toda la señal del magnetómetro tiene menos ponderación en el algoritmo de fusión subyacente de ahrsfilter.
Establezca MagneticDisturbanceNoise en 200 y ejecute la simulación nuevamente.
La salida de estimación de orientación de ahrsfilter es más precisa y se ve menos afectada por el transitorio magnético. Sin embargo, debido a que la señal del magnetómetro tiene menos peso en el algoritmo de fusión subyacente, el algoritmo puede tardar más en reestabilizarse.
reset(FUSE) FUSE.MagneticDisturbanceNoise = 20; orientation = FUSE(accelReadings,gyroReadings,magReadings); orientationEulerAngles = eulerd(orientation,'ZYX','frame'); figure(4) plot(time,orientationEulerAngles(:,1), ... time,orientationEulerAngles(:,2), ... time,orientationEulerAngles(:,3)) xlabel('Time (s)') ylabel('Rotation (degrees)') legend('z-axis','y-axis','x-axis') title('Filtered IMU Data with Magnetic Disturbance and Modified Properties')

Este ejemplo utiliza ahrsfilter System object™ para fusionar datos IMU de 9 ejes de un cuerpo de sensor que se agita. Trace la distancia del cuaternión entre el objeto y su posición de reposo final para visualizar el rendimiento y la rapidez con la que el filtro converge a la posición de reposo correcta. A continuación, ajuste los parámetros de ahrsfilter para que el filtro converja más rápidamente a la posición de reposo de ground-truth .
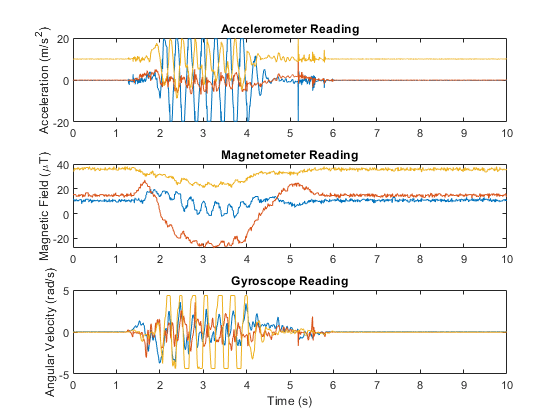
Cargue IMUReadingsShaken en su espacio de trabajo actual. Estos datos se registraron desde una IMU que se agitó y luego se colocó en posición de reposo. Visualice la aceleración, el campo magnético y la velocidad angular registrados por los sensores.
load 'IMUReadingsShaken' accelReadings gyroReadings magReadings SampleRate numSamples = size(accelReadings,1); time = (0:(numSamples-1))'/SampleRate; figure(1) subplot(3,1,1) plot(time,accelReadings) title('Accelerometer Reading') ylabel('Acceleration (m/s^2)') subplot(3,1,2) plot(time,magReadings) title('Magnetometer Reading') ylabel('Magnetic Field (\muT)') subplot(3,1,3) plot(time,gyroReadings) title('Gyroscope Reading') ylabel('Angular Velocity (rad/s)') xlabel('Time (s)')
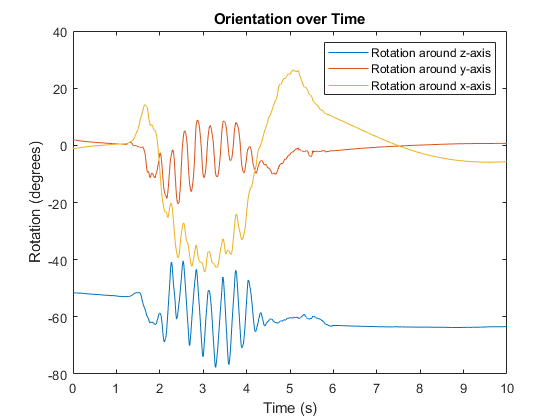
Cree un ahrsfilter y luego fusione los datos de la IMU para determinar la orientación. La orientación se devuelve como un vector de cuaterniones; convierta los cuaterniones a ángulos de Euler en grados. Visualice la orientación del cuerpo del sensor a lo largo del tiempo trazando los ángulos de Euler necesarios, en cada paso de tiempo, para rotar el sistema de coordenadas global al sistema de coordenadas del cuerpo del sensor.
fuse = ahrsfilter('SampleRate',SampleRate); orientation = fuse(accelReadings,gyroReadings,magReadings); orientationEulerAngles = eulerd(orientation,'ZYX','frame'); figure(2) plot(time,orientationEulerAngles(:,1), ... time,orientationEulerAngles(:,2), ... time,orientationEulerAngles(:,3)) xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation over Time') legend('Rotation around z-axis', ... 'Rotation around y-axis', ... 'Rotation around x-axis')
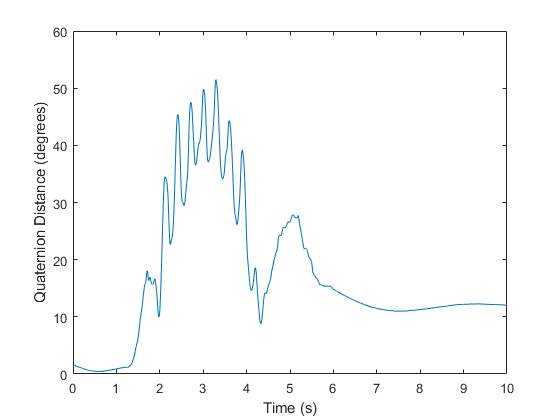
En la grabación IMU, el temblor se detiene después de aproximadamente seis segundos. Determina la orientación en reposo para que puedas caracterizar qué tan rápido converge ahrsfilter.
Para determinar la orientación en reposo, calcule los promedios del campo magnético y la aceleración durante los últimos cuatro segundos y luego utilice la función ecompass para fusionar los datos.
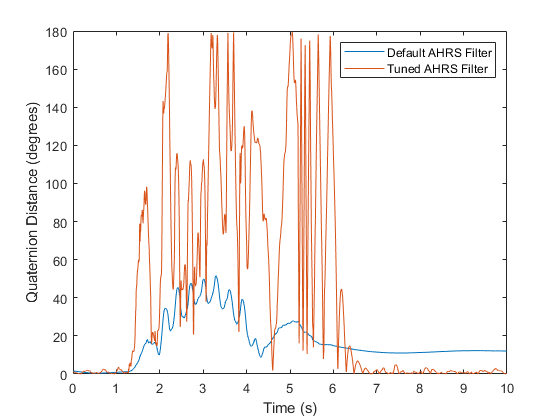
Visualice la distancia del cuaternión desde la posición de reposo a lo largo del tiempo.
restingOrientation = ecompass(mean(accelReadings(6*SampleRate:end,:)), ... mean(magReadings(6*SampleRate:end,:))); figure(3) plot(time,rad2deg(dist(restingOrientation,orientation))) hold on xlabel('Time (s)') ylabel('Quaternion Distance (degrees)')
Modifique las propiedades predeterminadas ahrsfilter para que el filtro converja a la gravedad más rápidamente. Aumente GyroscopeDriftNoise a 1e-2 y disminuya LinearAccelerationNoise a 1e-4. Esto le indica al algoritmo ahrsfilter que pondere menos los datos del giroscopio y más los datos del acelerómetro. Debido a que los datos accelerometer proporcionan el vector de gravedad estabilizador y consistente, la orientación resultante converge más rápidamente.
Restablezca el filtro, fusione los datos y trace los resultados.
fuse.LinearAccelerationNoise = 1e-4; fuse.GyroscopeDriftNoise = 1e-2; reset(fuse) orientation = fuse(accelReadings,gyroReadings,magReadings); figure(3) plot(time,rad2deg(dist(restingOrientation,orientation))) legend('Default AHRS Filter','Tuned AHRS Filter')
Algoritmos
Nota: El siguiente algoritmo sólo se aplica a un marco de referencia NED.
El ahrsfilter utiliza la estructura de filtro Kalman de nueve ejes descrita en [1]. El algoritmo intenta rastrear los errores de orientación, desplazamiento del giroscopio, aceleración lineal y perturbación magnética para generar la orientación final y la velocidad angular. En lugar de rastrear la orientación directamente, el filtro Kalman indirecto modela el proceso de error, x, con una actualización recursiva:
donde xk es un vector de 12 por 1 que consta de:
θk –– Vector de error de orientación de 3 por 1, en grados, en el tiempo k
bk –– Vector de sesgo de velocidad angular cero del giroscopio 3 por 1, en grados/s, en el momento k
ak –– Vector de error de aceleración de 3 por 1 medido en el marco del sensor, en g, en el tiempo k
dk –– Vector de error de perturbación magnética de 3 por 1 medido en el marco del sensor, en µT, en el tiempo k
y donde wk es un vector de ruido aditivo de 12 por 1, y Fk es el modelo de transición de estado.
Dado que xk se define como el proceso de error, la estimación a priori siempre es cero y, por lo tanto, el modelo de transición de estado, Fk, es cero. Esta idea da como resultado la siguiente reducción de las ecuaciones estándar de Kalman:
Ecuaciones de Kalman estándar:
Ecuaciones de Kalman utilizadas en este algoritmo:
donde:
xk− –– estimación del estado predicho (a priori); el proceso de error
Pk− –– estimación de covarianza prevista (a priori)
yk –– innovación
Sk –– covarianza de la innovación
Kk –– Ganancia de Kalman
xk+ –– estimación de estado actualizada (a posteriori)
Pk+ –– estimación de covarianza actualizada (a posteriori)
k representa la iteración, el superíndice + representa una estimación a posteriori y el superíndice − representa una estimación a priori.
El gráfico y los siguientes pasos describen una iteración basada en un solo cuadro a través del algoritmo.
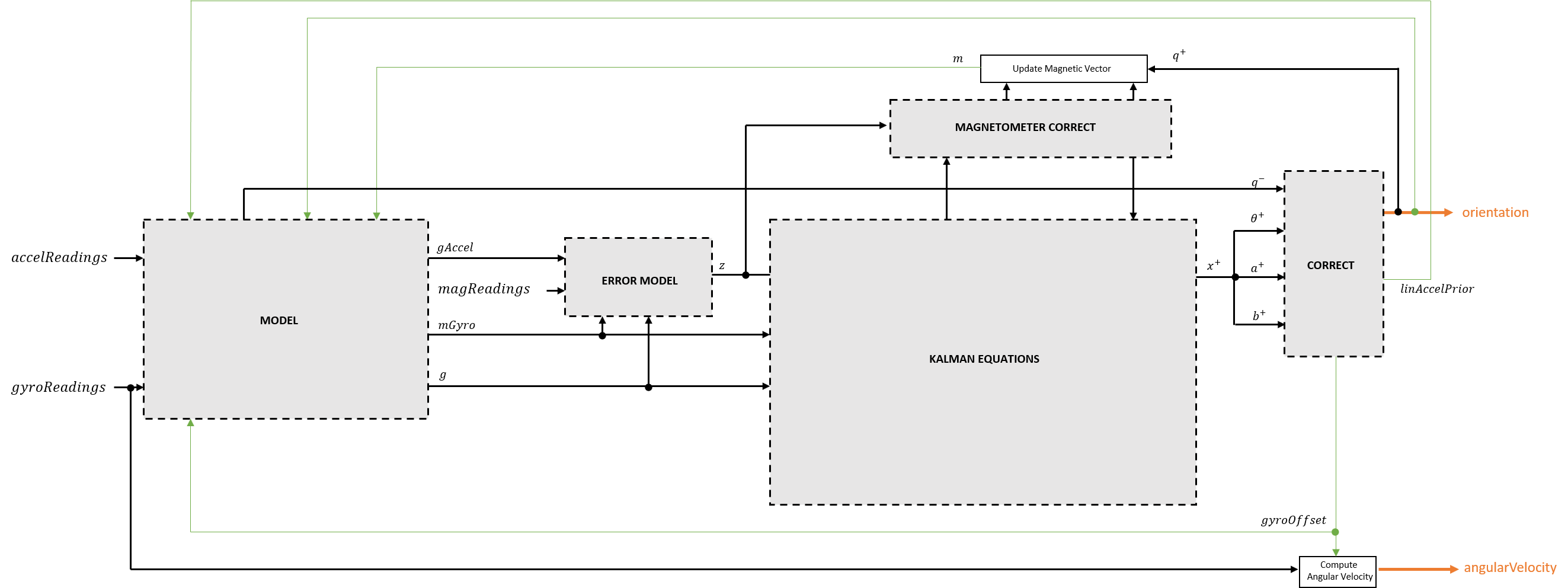
Antes de la primera iteración, las entradas accelReadings, gyroReadings y magReadings se dividen en cuadros DecimationFactor por 3. Para cada fragmento, el algoritmo utiliza las lecturas más actuales del acelerómetro y magnetómetro correspondientes al fragmento de lecturas del giroscopio.
Lea el algoritmo para obtener una explicación de cada etapa de la descripción detallada.
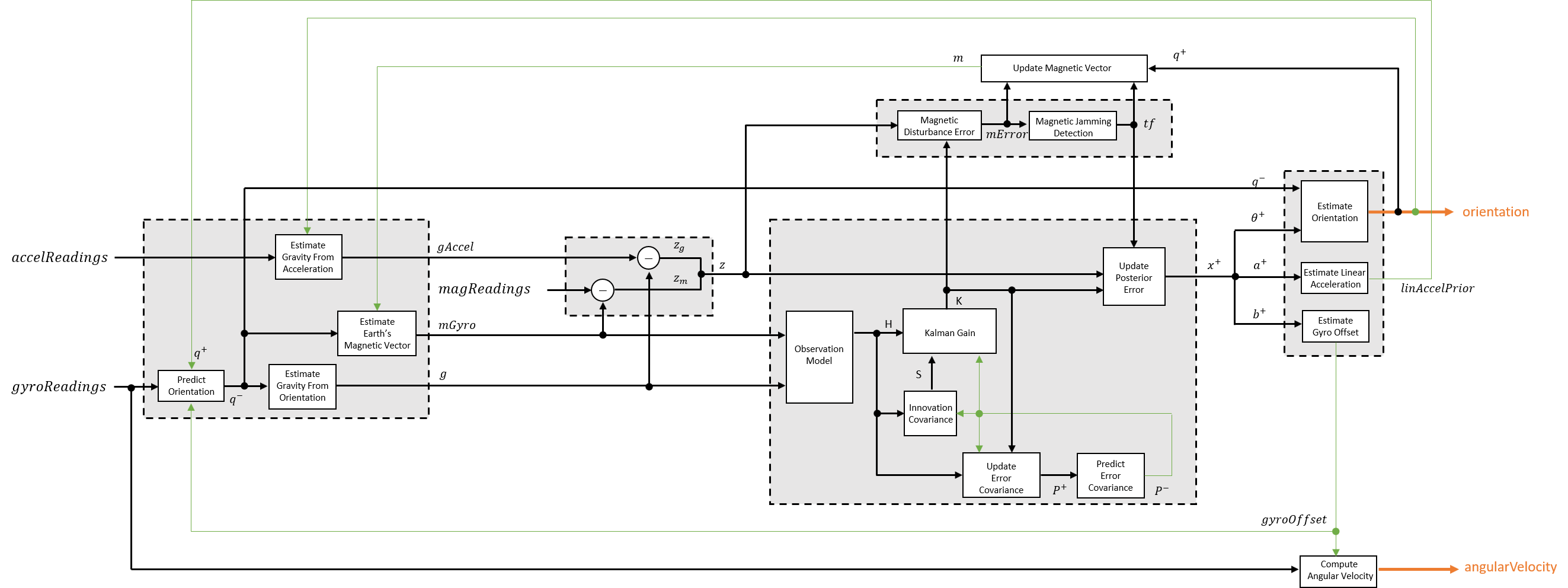
El algoritmo modela la aceleración y el cambio angular como procesos lineales.
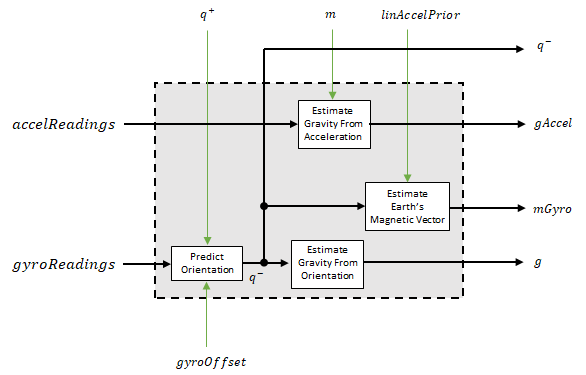
La orientación del cuadro actual se predice estimando primero el cambio angular respecto del cuadro anterior:
donde N es el factor de diezmado especificado por la propiedad DecimationFactor y fs es la frecuencia de muestreo especificada por la propiedad SampleRate.
El cambio angular se convierte en cuaterniones utilizando la sintaxis de construcción rotvec quaternion:
La estimación de orientación anterior se actualiza girándola por Δ Q:
Durante la primera iteración, la estimación de orientación, q−, se inicializa mediante ecompass.
El vector de gravedad se interpreta como la tercera columna del cuaternión, q−, en forma de matriz de rotación:
Consulte [1] para obtener una explicación de por qué la tercera columna de rPrior puede interpretarse como el vector de gravedad.
Se realiza una segunda estimación del vector de gravedad restando la estimación de aceleración lineal decaida de la iteración anterior de las lecturas del acelerómetro:
El vector magnético de la Tierra se estima rotando la estimación del vector magnético de la iteración anterior por la estimación de orientación a priori, en forma de matriz de rotación:
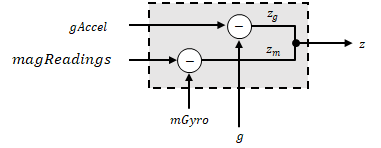
El modelo de error combina dos diferencias:
La diferencia entre la estimación de la gravedad a partir de las lecturas del acelerómetro y la estimación de la gravedad a partir de las lecturas del giroscopio:
La diferencia entre la estimación del vector magnético a partir de las lecturas del giroscopio y la estimación del vector magnético a partir del magnetómetro:
El magnetómetro calcula correctamente el error en la estimación del vector magnético y detecta interferencias magnéticas.

El error de perturbación magnética se calcula multiplicando la matriz de la ganancia de Kalman asociada al vector magnético con la señal de error:
La ganancia de Kalman, K, es la ganancia de Kalman calculada en la iteración actual.
La interferencia magnética se determina verificando que la potencia de la perturbación magnética detectada sea menor o igual a cuatro veces la potencia de la intensidad del campo magnético esperado:
ExpectedMagneticFieldStrength es una propiedad de ahrsfilter.
Las ecuaciones de Kalman utilizan la estimación de gravedad derivada de las lecturas del giroscopio, g, la estimación del vector magnético derivada de las lecturas del giroscopio, mGyro, y la observación del proceso de error, z, para actualizar las matrices de ganancia de Kalman y de covarianza intermedia. La ganancia de Kalman se aplica a la señal de error, z, para generar una estimación de error a posteriori, x+.
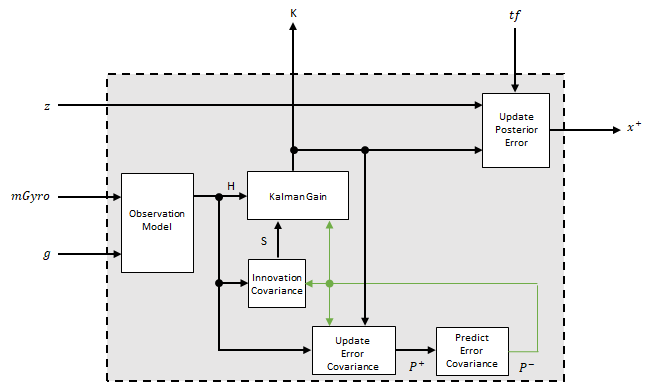
El modelo de observación asigna los estados observados de 1 por 3, g y mGyro, al estado real de 6 por 12, H.
El modelo de observación se construye como:
donde gx, gy y gz son los elementos x, y y z del vector de gravedad estimado a partir de la orientación a priori, respectivamente. mx, my y mz son los elementos x, y y z del vector magnético estimado a partir de la orientación a priori, respectivamente. κ es una constante determinada por las propiedades SampleRate y DecimationFactor: κ = DecimationFactor/SampleRate.
Consulte las secciones 7.3 y 7.4 de [1] para obtener una derivación del modelo de observación.
La covarianza de innovación es una matriz de 6 por 6 que se utiliza para rastrear la variabilidad en las mediciones. La matriz de covarianza de innovación se calcula como:
donde
H es la matriz del modelo de observación
P− es la estimación predicha (a priori) de la covarianza del modelo de observación calculado en la iteración anterior
R es la covarianza del ruido del modelo de observación, calculada como:
donde
y
Las siguientes propiedades definen la variación del ruido del modelo de observación:
La covarianza de la estimación del error es una matriz de 12 por 12 que se utiliza para rastrear la variabilidad en el estado.
La matriz de covarianza de estimación de error se actualiza como:
donde K es la ganancia de Kalman, H es la matriz de medición y P− es la covarianza de estimación de error calculada durante la iteración anterior.
La covarianza de la estimación del error es una matriz de 12 por 12 que se utiliza para rastrear la variabilidad en el estado. La covarianza de estimación de error a priori, P−, se establece en la covarianza de ruido del proceso, Q, determinada durante la iteración anterior. Q se calcula como una función de la covarianza de estimación de error a posteriori, P+. Al calcular Q, se supone que los términos de correlación cruzada son insignificantes en comparación con los términos de autocorrelación y se establecen en cero:
dónde
P+ –– es la covarianza de estimación de error actualizada (a posteriori)
β –– GyroscopeDriftNoise
η –– GyroscopeNoise
Consulte la sección 10.1 de [1] para obtener una derivación de los términos de la matriz de error del proceso.
La matriz de ganancia de Kalman es una matriz de 12 por 6 que se utiliza para ponderar la innovación. En este algoritmo, la innovación se interpreta como el proceso de error, z.
La matriz de ganancia de Kalman se construye como:
donde
P− –– covarianza del error previsto
H –– modelo de observación
S –– covarianza de la innovación
La estimación del error a posterior se determina combinando la matriz de ganancia de Kalman con el error en las estimaciones del vector de gravedad y del vector magnético:
Si se detecta interferencia magnética en la iteración actual, se ignora la señal de error del vector magnético y la estimación del error a posterior se calcula como:
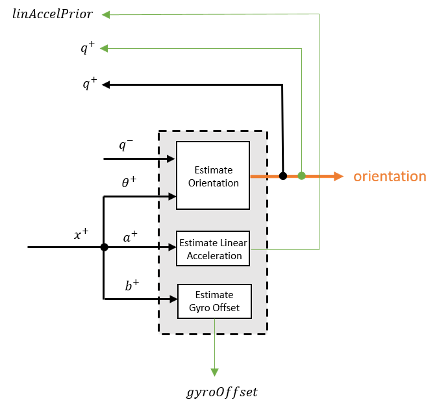
La estimación de orientación se actualiza multiplicando la estimación anterior por el error:
La estimación de la aceleración lineal se actualiza decayendo la estimación de la aceleración lineal de la iteración anterior y restando el error:
donde
La estimación del desplazamiento del giroscopio se actualiza restando el error de desplazamiento del giroscopio del desplazamiento del giroscopio de la iteración anterior:
Referencias
[1] Open Source Sensor Fusion. https://github.com/memsindustrygroup/Open-Source-Sensor-Fusion/tree/master/docs
[2] Roetenberg, D., H.J. Luinge, C.T.M. Baten, and P.H. Veltink. "Compensation of Magnetic Disturbances Improves Inertial and Magnetic Sensing of Human Body Segment Orientation." IEEE Transactions on Neural Systems and Rehabilitation Engineering. Vol. 13. Issue 3, 2005, pp. 395-405.