gpsdev
Conéctese a un receptor GPS conectado a la computadora host
Descripción
El gpsdev System object™ se conecta a un receptor GPS conectado a la computadora host.
Para conectarse a un receptor GPS:
Cree el objeto
gpsdevy configure sus propiedades.Llame al objeto con argumentos, como si fuera una función.
Para más información sobre el funcionamiento de los System objects, consulte ¿Qué son los System Objects?
Creación
Descripción
gps = gpsdev(port)
gps = gpsdev(serialobj)
gps = gpsdev(___,Name=Value)gps = gpsdev("COM4",SamplesPerRead=2) establece muestras por lectura en 2.
Argumentos de entrada
Propiedades
Funciones del objeto
Para usar una función de objeto, especifique el System object como el primer argumento de entrada. Por ejemplo, para liberar recursos de sistema de un System object llamado obj, utilice la siguiente sintaxis:
release(obj)
flush | Borre todos los datos de GPS acumulados en los buffers y restablezca las propiedades |
info | Lea la frecuencia de actualización, la información de bloqueo del GPS y la cantidad de satélites a la vista para el receptor GPS. |
read | Leer datos del receptor GPS |
release | Liberar el objeto GPS |
writeBytes | Escribir comandos sin formato al receptor GPS |
Ejemplos
Obtenga la ubicación geográfica utilizando el receptor GPS conectado a la computadora host en un puerto serie específico y trace la ubicación en un mapa.
Hardware requerido
Para ejecutar este ejemplo, necesita:
Módulo GPS UBlox Neo-6M
antena gps
Módulo USB a UART
cable USB
Cables de conexión
Conexión de hardware
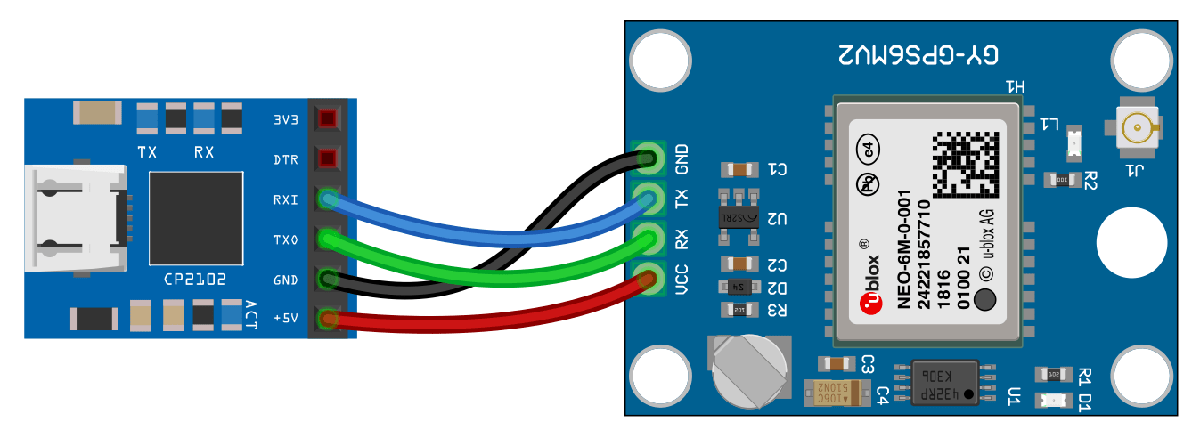
Conecte los pines del módulo GPS UBlox Neo-6M a los pines de su módulo USB a UART. Las conexiones son:
VCC - +5V
RX-TXO
TX-RXI
Tierra - Tierra
Conecte la antena GPS al módulo GPS. Conecte el módulo USB a UART a la computadora host con un cable USB. GPS Fix se puede adquirir fácilmente en lugares que tengan una vista despejada del cielo. Espere a que el módulo GPS adquiera señales de satélite (Fix). Esto se puede verificar verificando el LED Fix (D1) de su módulo GPS.
Crear objeto GPS
Crea un objeto gpsdev para el módulo GPS conectado a un puerto específico.
gps = gpsdev('COM4')gps =
gpsdev with properties:
SerialPort: COM4
BaudRate: 9600 (bits/s)
SamplesPerRead: 1
ReadMode: "latest"
SamplesRead: 0
Show all properties all functions
Leer los datos del GPS
Lea los datos del GPS y extraiga la latitud, longitud y hora de ellos. El GPS devuelve la fecha y hora UTC. Conviértalo a la zona horaria del sistema.
[gpsData,~] = read(gps);
latitude = gpsData.LLA(1);
longitude = gpsData.LLA(2);
gpsTime = gpsData.GPSReceiverTime;
gpsTime.TimeZone = 'local';Trazar la posición en un mapa junto con la marca de tiempo.
Trazar la posición en ejes geográficos con los datos obtenidos del módulo GPS. El GPS debería tener una solución para obtener valores válidos de latitud, longitud y gpsTime.
Si el módulo GPS no tiene corrección, los comandos anteriores dan NaN s para latitud y longitud y NaT para gpsTime. En este caso, asegúrese de que la antena esté expuesta a un cielo despejado, espere un tiempo y vuelva a intentar los pasos anteriores.
if(~isnan(latitude) && ~isnan(longitude)) % plot the position in geographic coordinates fig = geoplot(latitude,longitude,'Marker',"o",'MarkerSize',6,'Color','red','MarkerFaceColor','red'); % Sets the latitude and longitude limits of the base Map geolimits([latitude-0.05 latitude+0.05],[longitude-0.05 longitude+0.05]) ; % Selects the basemap geobasemap streets; timeString = strcat("Timestamp: ",string(gpsTime)); % Create annotation and display time received from GPS annotation('textbox',[0.005 0.98 0.6 0.01],'FitBoxToText','on','string',timeString,'Color','blue','FontSize',10); end
Limpiar
Cuando la conexión ya no sea necesaria, borre el objeto asociado.
delete(gps);
clear gps;Escriba comandos de configuración en el receptor GPS conectado a la computadora host mediante el objeto serialport.
Hardware requerido
Para ejecutar este ejemplo, necesita:
Módulo GPS UBlox Neo-6M
antena gps
Módulo USB a UART
cable USB
Cables de conexión
Conexión de hardware
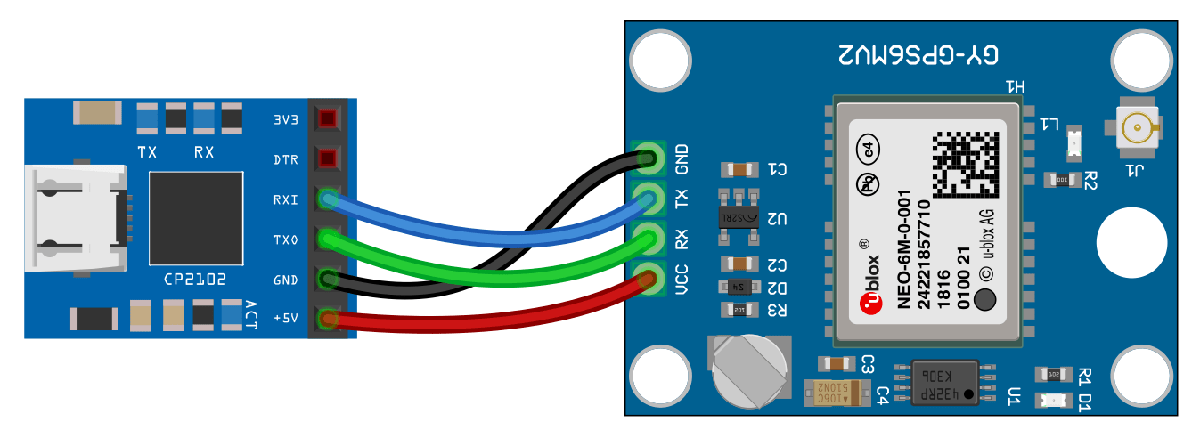
Conecte los pines del módulo GPS UBlox Neo-6M a los pines de su módulo USB a UART. Las conexiones son:
VCC - +5V
RX-TXO
TX-RXI
Tierra - Tierra
Conecte la antena GPS al módulo GPS. Conecte el módulo USB a UART a la computadora host con un cable USB. GPS Fix se puede adquirir fácilmente en lugares que tengan una vista despejada del cielo. Espere a que el módulo GPS adquiera señales satelitales (Fix). Esto se puede verificar verificando el LED Fix (D1) de su módulo GPS.
Crear objeto GPS
Conéctese al receptor GPS utilizando el objeto serialport. Especifique el nombre del puerto y la velocidad en baudios.
s = serialport('COM4',9600)s =
Serialport with properties:
Port: "COM4"
BaudRate: 9600
NumBytesAvailable: 0
Show all properties, functions
gps = gpsdev(s)
gps =
gpsdev with properties:
SerialPort: COM4
BaudRate: 9600 (bits/s)
SamplesPerRead: 1
ReadMode: "latest"
SamplesRead: 0
Show all properties all functions
Escribir comandos de configuración
En la configuración predeterminada, el receptor GPS devuelve los siguientes mensajes NMEA: GPRMC, GPVTG, GPGGA, GPGSA, GPGSV y GPGLL. El receptor se puede configurar para que tenga un conjunto de mensajes de salida definido por el usuario.
Lea algunas líneas de mensajes predeterminados desde el puerto serie al que está conectado el receptor GPS.
for i = 1:10 data = readline(s); disp(data); end
$GPRMC,,V,,,,,,,,,,N*53 $GPVTG,,,,,,,,,N*30 $GPGGA,,,,,,0,00,99.99,,,,,,*48 $GPGSA,A,1,,,,,,,,,,,,,99.99,99.99,99.99*30 $GPGSV,2,1,08,01,,,18,08,,,12,09,,,12,15,,,19*77 $GPGSV,2,2,08,23,,,13,24,,,09,25,,,10,27,,,25*79 $GPGLL,,,,,,V,N*64 $GPRMC,,V,,,,,,,,,,N*53 $GPVTG,,,,,,,,,N*30 $GPGGA,,,,,,0,00,99.99,,,,,,*48
Escriba el comando del monitor de versión en el receptor GPS para devolver la versión de software y hardware del receptor GPS.
configCMD = [0xB5 0x62 0x0A 0x04 0x00 0x00 0x0E 0x34]; % writeBytes(gps,cfg) write(s,configCMD,'uint8')
Lea algunas líneas de mensajes nuevamente para verificar la versión del mensaje.
for i = 1:10 data = readline(s); disp(data); end
$GPGSA,A,1,,,,,,,,,,,,,99.99,99.99,99.99*30 $GPGSV,2,1,05,01,,,13,09,,,11,15,,,16,23,,,12*74 $GPGSV,2,2,05,25,,,10*7A $GPGLL,,,,,,V,N*64 µb ( 7.03 (45969) 00040007 °$GPRMC,,V,,,,,,,,,,N*53 $GPVTG,,,,,,,,,N*30 $GPGGA,,,,,,0,00,99.99,,,,,,*48 $GPGSA,A,1,,,,,,,,,,,,,99.99,99.99,99.99*30 $GPGSV,2,1,06,01,,,11,09,,,11,23,,,14,24,,,21*75
Se puede observar en la salida que 7.03 (45969) es la versión del software y 00040007 es la versión del hardware.
Limpiar
Cuando la conexión ya no sea necesaria, borre el objeto asociado.
delete(gps); clear gps; clear s;
Lea los datos del receptor GPS conectado a la computadora host en un puerto serie específico.
Hardware requerido
Para ejecutar este ejemplo, necesita:
Módulo GPS UBlox Neo-6M
antena gps
Módulo USB a UART
cable USB
Cables de conexión
Conexión de hardware
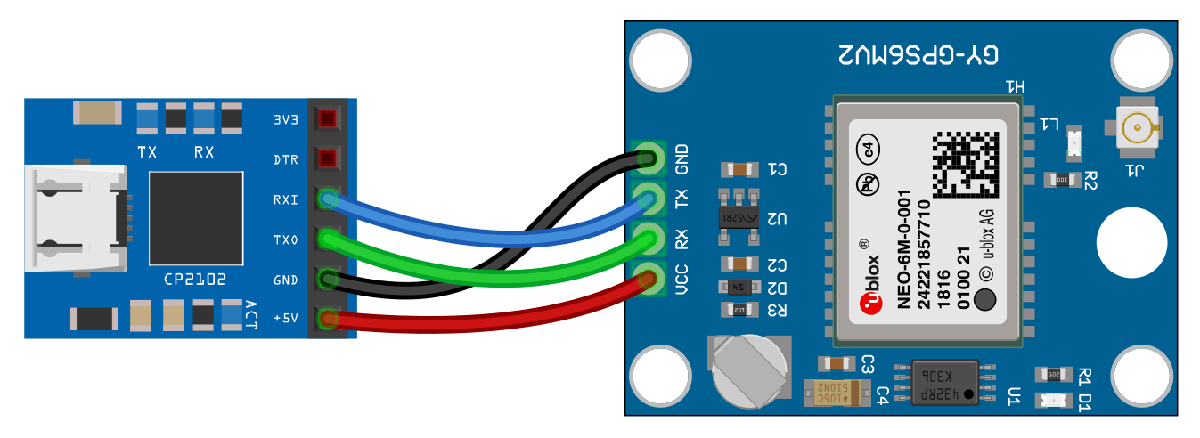
Conecte los pines del módulo GPS UBlox Neo-6M a los pines de su módulo USB a UART. Las conexiones son:
VCC - +5V
RX-TXO
TX-RXI
Tierra - Tierra
Conecte la antena GPS al módulo GPS. Conecte el módulo USB a UART a la computadora host con un cable USB. GPS Fix se puede adquirir fácilmente en lugares que tengan una vista despejada del cielo. Espere a que el módulo GPS adquiera señales de satélite (Reparación). Esto se puede verificar verificando el LED Fix (D1) de su módulo GPS.
Crear objeto GPS
Crea un objeto gpsdev para el receptor GPS conectado a un puerto específico. Especifique el formato de salida de los datos como un calendario.
gps = gpsdev('COM4','OutputFormat',"timetable")
gps =
gpsdev with properties:
SerialPort: COM4
BaudRate: 9600 (bits/s)
SamplesPerRead: 1
ReadMode: "latest"
SamplesRead: 0
Show all properties all functions
Leer los datos del GPS
Leer los datos del GPS y devolverlos como horario.
[tt,overruns] = read(gps)
tt=1×5 timetable
Time LLA GroundSpeed Course DOPs GPSReceiverTime
________________________ _________________________ ___________ ______ ____________________ ________________________
22-Mar-2021 15:31:15.190 17.47 78.343 449.6 0.25619 NaN 9.31 1.48 9.19 22-Mar-2021 10:01:14.000
overruns = 0
Muestra el número de muestras leídas y las muestras disponibles en el búfer del host.
gps.SamplesRead
ans = 1
gps.SamplesAvailable
ans = 0
Suelte el objeto GPS para configurar las propiedades no ajustables. La función de liberación también borra el búfer y restablece las propiedades SamplesRead y SamplesAvailable.
release(gps)
Especifique el número de muestras por lectura en 2. Leer los datos del GPS.
gps.SamplesPerRead = 2; read(gps)
ans=2×5 timetable
Time LLA GroundSpeed Course DOPs GPSReceiverTime
________________________ _________________________ ___________ ______ ____________________ ________________________
22-Mar-2021 15:31:17.178 17.47 78.343 450 0.063791 NaN 9.32 1.48 9.2 22-Mar-2021 10:01:16.000
22-Mar-2021 15:31:17.178 17.47 78.343 450 0.063791 NaN 9.32 1.48 9.2 22-Mar-2021 10:01:16.000
Muestra el número de muestras leídas y las muestras disponibles en el búfer del host.
gps.SamplesRead
ans = 1
gps.SamplesAvailable
ans = 0
Limpiar
Cuando la conexión ya no sea necesaria, borre el objeto asociado.
delete(gps);
clear gps;Más acerca de
Historial de versiones
Introducido en R2020b