gravitydir
Descripción
D = gravitydir(orientations)orientations. De forma predeterminada, el marco de referencia de estas orientaciones es el marco de referencia noreste abajo (NED). Consulte Dirección de gravedad para obtener más detalles.
D = gravitydir(orientations,RF)"NED" (noreste-abajo) o el marco "ENU" (este-norte-arriba).
Ejemplos
Cree un cuaternión de identidad y obtenga el vector de dirección de gravedad correspondiente. Verifique que el vector de dirección de la gravedad sea [0 0 1] como se esperaba.
quat0 = ones(1,"quaternion");
dir1 = gravitydir(quat0)dir1 = 1×3
0 0 1
A continuación, cree un cuaternión que corresponda a una rotación x de 90 grados. Obtenga el vector de dirección de la gravedad.
angles = [0 0 90]; quat1 = quaternion(angles,"eulerd","ZYX","frame"); dir2 = gravitydir(quat1)
dir2 = 1×3
0 1.0000 0.0000
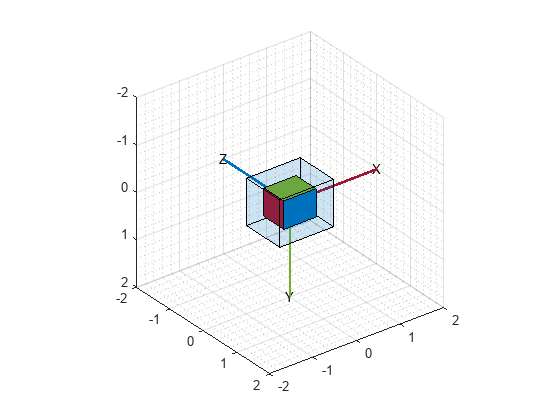
Puedes verificar visualmente este resultado utilizando la función poseplot. En la figura, puedes ver que la aceleración gravitacional está a lo largo del eje y.
poseplot(quat1)
Cambie el marco de referencia al marco este-norte-arriba (ENU) y obtenga el vector de dirección de la gravedad.
dir3 = gravitydir(quat1,"ENU")dir3 = 1×3
0 -1.0000 -0.0000
Finalmente, cree un vector de cuaterniones aleatorios y obtenga los vectores de dirección de gravedad correspondientes.
rng(2023) % For repeatable results
quats = randrot(10,1);
D = gravitydir(quats)D = 10×3
-0.2859 -0.8615 -0.4197
-0.7971 -0.3204 0.5119
0.3598 0.7139 -0.6007
0.3622 0.6720 0.6460
0.1749 0.4020 0.8988
0.4627 0.3655 -0.8077
0.3134 0.8613 0.4000
0.8776 0.4267 -0.2185
-0.9924 -0.1226 0.0137
0.4086 -0.4099 0.8155
Argumentos de entrada
Argumentos de salida
Más acerca de
La función gravitydir devuelve el vector de dirección de gravedad expresado en el marco del cuerpo cuya orientación está dada por el argumento de entrada orientations. Por ejemplo, en el marco de referencia NED, la orientación define la transformación de coordenadas de rotación del marco NED (X-Y-Z) al marco del cuerpo (x-y-z). La función gravitydir resuelve el vector de dirección de gravedad g en tres componentes gx, gy y gz y devuelve estos componentes.

Capacidades ampliadas
Historial de versiones
Introducido en R2023b
Consulte también
linaccel | compassAngle | tilt