INS
Simular sensor INS

Bibliotecas:
Navigation Toolbox /
Multisensor Positioning /
Sensor Models
Automated Driving Toolbox /
Driving Scenario and Sensor Modeling
Sensor Fusion and Tracking Toolbox /
Multisensor Positioning /
Sensor Models
UAV Toolbox /
UAV Scenario and Sensor Modeling
Descripción
El bloque simula un sensor INS, que genera posición, velocidad y orientación corrompidas por ruido en función de las entradas correspondientes. Opcionalmente, el bloque también puede generar aceleración y velocidad angular en función de las entradas correspondientes. Para cambiar el nivel de ruido presente en la salida, puede variar las precisiones de balanceo, cabeceo, guiñada, posición, velocidad, aceleración y velocidad angular. La precisión se define como la desviación estándar del ruido.
Ejemplos
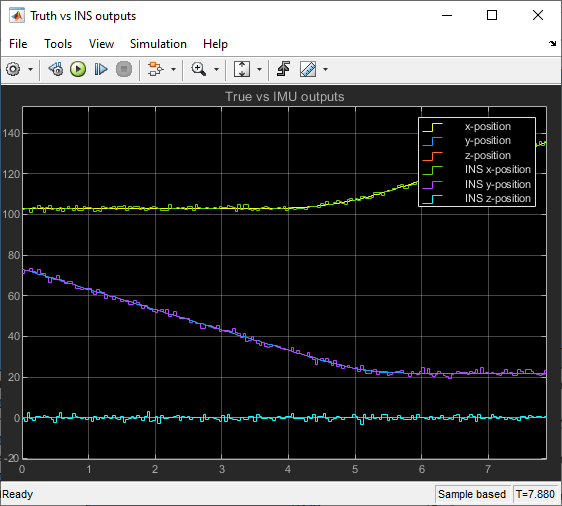
Simular bloque INS
En este ejemplo, simula un bloque INS utilizando la información de pose de un vehículo que emprende una trayectoria de giro a la izquierda.
Puertos
Entrada
Posición del sensor INS con respecto al marco de navegación, en metros, especificada como una matriz de valores reales N por 3. N es el número de muestras.
Tipos de datos: single | double
Velocidad del sensor INS con respecto al marco de navegación, en metros por segundo, especificada como una matriz de valores reales N por 3. N es el número de muestras.
Tipos de datos: single | double
Orientación del sensor INS relativa al marco de navegación, especificada como uno de estos formatos:
Una matriz de valores reales de 3 por 3 por N, donde cada página de la matriz (matriz de 3 por 3) es una matriz de rotación.
Una matriz de valores reales de N por 4, donde cada fila de la matriz son los cuatro elementos de un cuaternión.
Una matriz de ángulos de Euler de N por 3, donde cada fila de la matriz son los tres ángulos de Euler correspondientes a la convención de rotación z-y-x.
N es el número de muestras.
Tipos de datos: single | double
Aceleración del sensor INS con respecto al marco de navegación, en metros por segundo al cuadrado, especificada como una matriz de valores reales N por 3. N es el número de muestras.
Dependencias
Para habilitar este puerto de entrada, seleccione Use acceleration and angular velocity.
Tipos de datos: single | double
Velocidad angular del sensor INS en relación con el marco de navegación, en grados por segundo, especificada como una matriz de valores reales N por 3. N es el número de muestras.
Dependencias
Para habilitar este puerto de entrada, seleccione Use acceleration and angular velocity.
Tipos de datos: single | double
Habilitar la corrección GNNS, especificada como un vector lógico N por 1. N es el número de muestras. Especifique esta entrada como false para simular la pérdida de la posición de un receptor GNSS. Cuando se pierde la posición de un receptor GNSS, las mediciones de posición se desplazan a una velocidad especificada por el parámetro Position error factor.
Dependencias
Para habilitar este puerto de entrada, seleccione Enable HasGNSSFix port.
Tipos de datos: single | double
Salida
Posición del sensor INS con respecto al marco de navegación, en metros, devuelta como una matriz de valores reales N por 3. N es el número de muestras en la entrada.
Tipos de datos: single | double
Velocidad del sensor INS en relación con el marco de navegación, en metros por segundo, devuelta como una matriz de valores reales N por 3. N es el número de muestras en la entrada.
Tipos de datos: single | double
Orientación del sensor INS relativa al marco de navegación, devuelta como uno de los formatos:
Una matriz de valores reales de 3 por 3 por N, donde cada página de la matriz (matriz de 3 por 3) es una matriz de rotación.
Una matriz de valores reales de N por 4, donde cada fila de la matriz son los cuatro elementos de un cuaternión.
Una matriz de ángulos de Euler de N por 3, donde cada fila de la matriz son los tres ángulos de Euler correspondientes a la convención de rotación z-y-x.
N es el número de muestras en la entrada.
Tipos de datos: single | double
Aceleración del sensor INS en relación con el marco de navegación, en metros por segundo al cuadrado, devuelta como una matriz de valores reales N por 3. N es el número de muestras.
Dependencias
Para habilitar este puerto de salida, seleccione Use acceleration and angular velocity.
Tipos de datos: single | double
Velocidad angular del sensor INS en relación con el marco de navegación, en grados por segundo, devuelta como una matriz de valores reales N por 3. N es el número de muestras.
Dependencias
Para habilitar este puerto de salida, seleccione Use acceleration and angular velocity.
Tipos de datos: single | double
Parámetros
Ubicación del sensor en la plataforma, en metros, especificada como un vector de valor real de tres elementos con la forma [x y z]. El vector define el desplazamiento del origen del sensor desde el origen de la plataforma.
Tipos de datos: single | double
Precisión de la medición del balanceo del cuerpo del sensor en grados, especificada como un escalar real no negativo.
El balanceo se define como la rotación alrededor del eje x del cuerpo del sensor. El ruido de rodadura se modela como ruido de proceso blanco con una desviación estándar igual al Roll accuracy especificado en grados.
Tipos de datos: single | double
Precisión de la medición del tono del cuerpo del sensor en grados, especificada como un escalar real no negativo.
El paso se define como la rotación alrededor del eje y del cuerpo del sensor. El ruido de tono se modela como ruido de proceso blanco con una desviación estándar igual al Pitch accuracy especificado en grados.
Tipos de datos: single | double
Precisión de la medición de la orientación del cuerpo del sensor en grados, especificada como un escalar real no negativo.
La guiñada se define como la rotación alrededor del eje z del cuerpo del sensor. El ruido de guiñada se modela como ruido de proceso blanco con una desviación estándar igual al Yaw accuracy especificado en grados.
Tipos de datos: single | double
Precisión de la medición de la posición del cuerpo del sensor en metros, especificada como un escalar real no negativo o un vector de 1 por 3 de valores no negativos. Si especifica el parámetro como un valor escalar, el bloque establece la precisión de los tres componentes de posición en este valor.
El ruido de posición se modela como ruido de proceso blanco con una desviación estándar igual al Position accuracy especificado en metros.
Tipos de datos: single | double
Precisión de la medición de la velocidad del cuerpo del sensor en metros por segundo, especificada como un escalar real no negativo.
El ruido de velocidad se modela como ruido de proceso blanco con una desviación estándar igual al Velocity accuracy especificado en metros por segundo.
Tipos de datos: single | double
Seleccione esta casilla de verificación para habilitar las entradas de bloque de aceleración y velocidad angular a través de los puertos de entrada Acceleration y AngularVelocity, respectivamente. Mientras tanto, el bloque emite las mediciones de aceleración y velocidad angular a través de los puertos de salida Acceleration y AngularVelocity, respectivamente. Además, al seleccionar este parámetro podrá especificar los parámetros Acceleration accuracy y Angular velocity accuracy.
Precisión de la medición de la aceleración del cuerpo del sensor en metros, especificada como un escalar real no negativo.
El ruido de aceleración se modela como ruido de proceso blanco con una desviación estándar igual al Acceleration accuracy especificado en metros por segundo al cuadrado.
Dependencias
Para habilitar este parámetro, seleccione Use acceleration and angular velocity.
Tipos de datos: single | double
Precisión de la medición de la velocidad angular del cuerpo del sensor en metros, especificada como un escalar real no negativo.
El ruido de velocidad angular se modela como ruido de proceso blanco con una desviación estándar igual al Angular velocity accuracy especificado en grados por segundo.
Dependencias
Para habilitar este parámetro, seleccione Use acceleration and angular velocity.
Tipos de datos: single | double
Seleccione esta casilla de verificación para habilitar el puerto de entrada HasGNSSFix. Cuando la entrada HasGNSSFix se especifica como false, las mediciones de posición se desplazan a una velocidad especificada por el parámetro Position error factor.
Factor de error de posición sin corrección GNSS, especificado como un escalar o un vector de valor real de 1 por 3. Si especifica el parámetro como un valor escalar, el bloque establece los factores de error de posición de los tres componentes de posición en este valor.
Cuando la entrada HasGNSSFix se especifica como false, el error de posición crece a una tasa cuadrática debido al sesgo constante en el acelerómetro. El error de posición de un componente de posición E(t) se puede expresar como E(t) = 1/2 αt2, donde α es el factor de error de posición del componente correspondiente y t es el tiempo transcurrido desde que se perdió la posición GNSS. Los valores E(t) calculados para los componentes x, y y z se agregan a los componentes de posición correspondientes de la salida Position.
Dependencias
Para habilitar este parámetro, seleccione Enable HasGNSSFix port.
Tipos de datos: double
Semilla inicial de un algoritmo generador de números aleatorios, especificada como un número entero no negativo.
Tipos de datos: single | double
Interpreted execution— Simular el modelo utilizando el intérprete MATLAB®. Esta opción acorta el tiempo de inicio. En el modoInterpreted execution, puede depurar el código fuente del bloque.Code generation— Simular el modelo utilizando el código C generado. La primera vez que se ejecuta una simulación, Simulink® genera código C para el bloque. El código C se reutiliza para simulaciones posteriores si el modelo no cambia. Esta opción requiere tiempo de inicio adicional.
Capacidades ampliadas
Generación de código C/C++
Genere código C y C++ mediante Simulink® Coder™.
Historial de versiones
Introducido en R2020b
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Seleccione un país/idioma
Seleccione un país/idioma para obtener contenido traducido, si está disponible, y ver eventos y ofertas de productos y servicios locales. Según su ubicación geográfica, recomendamos que seleccione: .
También puede seleccionar uno de estos países/idiomas:
Cómo obtener el mejor rendimiento
Seleccione China (en idioma chino o inglés) para obtener el mejor rendimiento. Los sitios web de otros países no están optimizados para ser accedidos desde su ubicación geográfica.
América
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)