insSensor
Sistema de navegación inercial y modelo de simulación GNSS/GPS.
Descripción
El insSensor System object™ modela un dispositivo que fusiona mediciones de un sistema de navegación inercial (INS) y un sistema global de navegación por satélite (GNSS), como un GPS, y genera las mediciones fusionadas.
Para generar mediciones INS y GNSS fusionadas:
Cree el objeto
insSensory configure sus propiedades.Llame al objeto con argumentos, como si fuera una función.
Para más información sobre el funcionamiento de los System objects, consulte ¿Qué son los System Objects?
Creación
Descripción
INS = insSensorINS, que modela un dispositivo que emite mediciones desde un INS y un GNSS.
INS = insSensor(Name,Value)
Propiedades
Uso
Descripción
measurement = INS(gTruth)gTruth.
measurement = INS(gTruth,simTime)simTime. Para habilitar esta sintaxis, establezca la propiedad TimeInput en true.
Argumentos de entrada
Argumentos de salida
Funciones del objeto
Para usar una función de objeto, especifique el System object como el primer argumento de entrada. Por ejemplo, para liberar recursos de sistema de un System object llamado obj, utilice la siguiente sintaxis:
release(obj)
Ejemplos
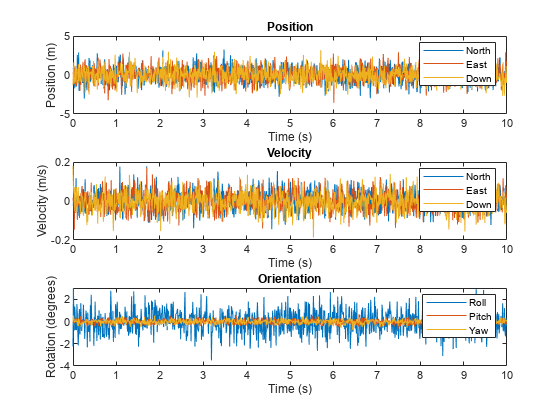
Cree una estructura de movimiento que defina una posición estacionaria en el origen local noreste hacia abajo (NED). Debido a que la plataforma es estacionaria, solo necesita definir una muestra. Supongamos que el movimiento ground-truth se muestrea durante 10 segundos con una frecuencia de muestreo de 100 Hz. Crea un insSensor System object ™ predeterminado. Preasigne variables para contener la salida del objeto insSensor.
Fs = 100; duration = 10; numSamples = Fs*duration; motion = struct( ... 'Position',zeros(1,3), ... 'Velocity',zeros(1,3), ... 'Orientation',ones(1,1,'quaternion')); INS = insSensor; positionMeasurements = zeros(numSamples,3); velocityMeasurements = zeros(numSamples,3); orientationMeasurements = zeros(numSamples,1,'quaternion');
En un bucle, llame a INS con la estructura de movimiento estacionario para devolver las mediciones de posición, velocidad y orientación en el sistema de coordenadas NED local. Registre las mediciones de posición, velocidad y orientación.
for i = 1:numSamples measurements = INS(motion); positionMeasurements(i,:) = measurements.Position; velocityMeasurements(i,:) = measurements.Velocity; orientationMeasurements(i) = measurements.Orientation; end
Convierta la orientación de cuaterniones a ángulos de Euler para fines de visualización. Trazar las medidas de posición, velocidad y orientación a lo largo del tiempo.
orientationMeasurements = eulerd(orientationMeasurements,'XYZ','frame'); t = (0:(numSamples-1))/Fs; subplot(3,1,1) plot(t,positionMeasurements) title('Position') xlabel('Time (s)') ylabel('Position (m)') legend('North','East','Down') subplot(3,1,2) plot(t,velocityMeasurements) title('Velocity') xlabel('Time (s)') ylabel('Velocity (m/s)') legend('North','East','Down') subplot(3,1,3) plot(t,orientationMeasurements) title('Orientation') xlabel('Time (s)') ylabel('Rotation (degrees)') legend('Roll', 'Pitch', 'Yaw')
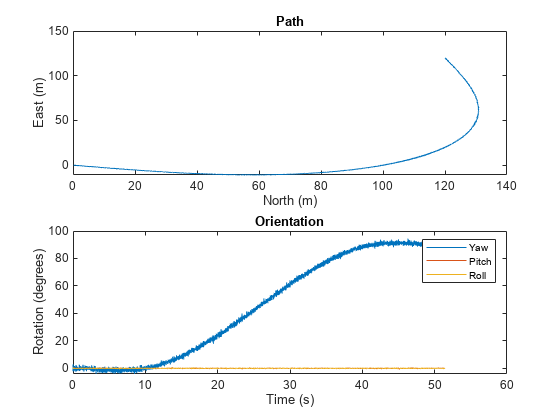
Genere mediciones INS utilizando insSensor System object ™. Utilice waypointTrajectory para generar la ruta de ground-truth .
Especifique una orientación de ground-truth que comience con el eje x del cuerpo del sensor alineado con el Norte y finalice con el eje x del cuerpo del sensor alineado con el Este. Especifique puntos de referencia para una trayectoria de arco y un vector de tiempo de llegada para los puntos de referencia correspondientes. Utilice una frecuencia de muestreo de 100 Hz. Cree un waypointTrajectory System object con las restricciones de puntos de referencia y configure SamplesPerFrame para que la trayectoria completa se muestre con una sola llamada.
eulerAngles = [0,0,0; ... 0,0,0; ... 90,0,0; ... 90,0,0]; orientation = quaternion(eulerAngles,'eulerd','ZYX','frame'); r = 20; waypoints = [0,0,0; ... 100,0,0; ... 100+r,r,0; ... 100+r,100+r,0]; toa = [0,10,10+(2*pi*r/4),20+(2*pi*r/4)]; Fs = 100; numSamples = floor(Fs*toa(end)); path = waypointTrajectory('Waypoints',waypoints, ... 'TimeOfArrival',toa, ... 'Orientation',orientation, ... 'SampleRate',Fs, ... 'SamplesPerFrame',numSamples);
Cree un insSensor System object para modelar la recepción de datos INS. Establezca PositionAccuracy en 0.1.
ins = insSensor('PositionAccuracy',0.1);Llame al objeto de trayectoria del punto de referencia, path, para generar el movimiento de ground-truth . Llame al simulador INS, ins, con el movimiento de ground-truth para generar mediciones INS.
[motion.Position,motion.Orientation,motion.Velocity] = path(); insMeas = ins(motion);
Convierte la orientación devuelta por ins en ángulos de Euler en grados para fines de visualización. Traza la ruta completa y la orientación a lo largo del tiempo.
orientationMeasurementEuler = eulerd(insMeas.Orientation,'ZYX','frame'); subplot(2,1,1) plot(insMeas.Position(:,1),insMeas.Position(:,2)); title('Path') xlabel('North (m)') ylabel('East (m)') subplot(2,1,2) t = (0:(numSamples-1)).'/Fs; plot(t,orientationMeasurementEuler(:,1), ... t,orientationMeasurementEuler(:,2), ... t,orientationMeasurementEuler(:,3)); title('Orientation') legend('Yaw','Pitch','Roll') xlabel('Time (s)') ylabel('Rotation (degrees)')
Capacidades ampliadas
Historial de versiones
Introducido en R2020b