maldad
Rotación media del cuaternión
Sintaxis
Descripción
quatAverage = meanrot(quat)quat a lo largo de la primera dimensión de la matriz cuyo tamaño no es igual a 1.
Si
quates un vector,meanrot(quat)devuelve la rotación promedio de los elementos.Si
quates una matriz,meanrot(quat)devuelve un vector fila que contiene la rotación promedio de cada columna.Si
quates una matriz multidimensional, entoncesmearot(quat)opera a lo largo de la primera dimensión de la matriz cuyo tamaño no sea igual a 1, tratando los elementos como vectores. Esta dimensión pasa a ser 1 mientras que los tamaños de todas las demás dimensiones siguen siendo los mismos.
La función meanrot normaliza los cuaterniones de entrada, quat, antes de calcular la media.
quatAverage = meanrot(quat,dim)dim. Por ejemplo, si quat es una matriz, entonces meanrot(quat,2) es un vector columna que contiene la media de cada fila.
quatAverage = meanrot(___,nanflag)NaN del cálculo para cualquiera de las sintaxis anteriores. meanrot(quat,"includenan") incluye todos los valores NaN en el cálculo, mientras que mean(quat,"omitnan") los ignora.
Ejemplos
Crea una matriz de cuaterniones correspondientes a tres conjuntos de ángulos de Euler.
eulerAngles = [40 20 10; ... 50 10 5; ... 45 70 1]; quat = quaternion(eulerAngles,"eulerd","ZYX","frame");
Determine la rotación promedio representada por los cuaterniones. Convierta la rotación promedio a ángulos de Euler en grados para facilitar la lectura.
quatAverage = meanrot(quat)
quatAverage = quaternion
0.88863 - 0.062598i + 0.27822j + 0.35918k
eulerAverage = eulerd(quatAverage,"ZYX","frame")
eulerAverage = 1×3
45.7876 32.6452 6.0407
Utilice meanrot sobre una secuencia de cuaterniones para promediar el ruido aditivo.
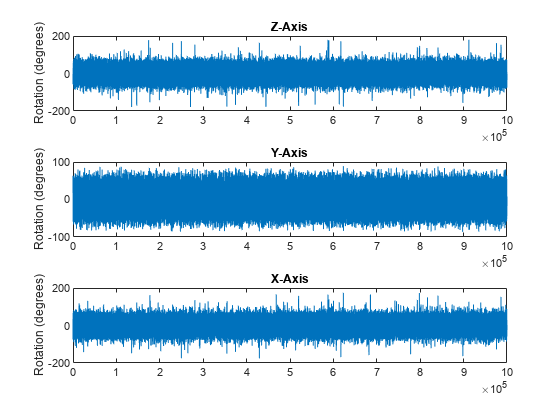
Cree un vector de 1e6 cuaterniones cuya distancia, tal como se define en la función dist, desde el cuaternión(1,0,0,0) se distribuya normalmente. Trazar los ángulos de Euler correspondientes al vector cuaternión ruidoso.
nrows = 1e6; ax = 2*rand(nrows,3) - 1; ax = ax./sqrt(sum(ax.^2,2)); ang = 0.5*randn(size(ax,1),1); q = quaternion(ax.*ang ,"rotvec"); noisyEulerAngles = eulerd(q,"ZYX","frame"); figure(1) subplot(3,1,1) plot(noisyEulerAngles(:,1)) title("Z-Axis") ylabel("Rotation (degrees)") hold on subplot(3,1,2) plot(noisyEulerAngles(:,2)) title("Y-Axis") ylabel("Rotation (degrees)") hold on subplot(3,1,3) plot(noisyEulerAngles(:,3)) title("X-Axis") ylabel("Rotation (degrees)") hold on
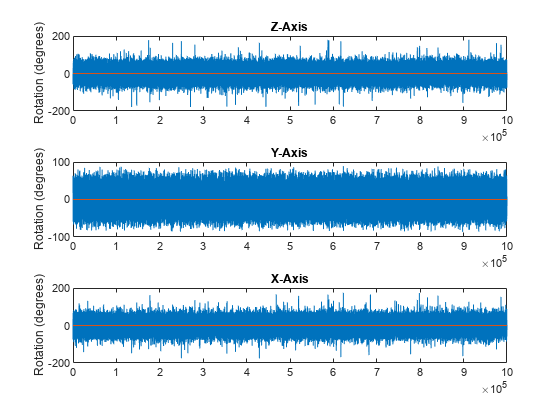
Utilice meanrot para determinar el cuaternión promedio dado el vector de cuaterniones. Convierta a ángulos de Euler y trace los resultados.
qAverage = meanrot(q); qAverageInEulerAngles = eulerd(qAverage,"ZYX","frame"); figure(1) subplot(3,1,1) plot(ones(nrows,1)*qAverageInEulerAngles(:,1)) title("Z-Axis") subplot(3,1,2) plot(ones(nrows,1)*qAverageInEulerAngles(:,2)) title("Y-Axis") subplot(3,1,3) plot(ones(nrows,1)*qAverageInEulerAngles(:,3)) title("X-Axis")
El algoritmo meanrot
La función meanrot genera un cuaternión que minimiza la norma de Frobenius al cuadrado de la diferencia entre matrices de rotación. Considere dos cuaterniones:
q0representa que no hay rotación.q90representa una rotación de 90 grados alrededor del eje x.
q0 = quaternion([0 0 0],"eulerd","ZYX","frame"); q90 = quaternion([0 0 90],"eulerd","ZYX","frame");
Crea un barrido de cuaternión, qSweep, que representa rotaciones de 0 a 180 grados alrededor del eje x.
eulerSweep = (0:1:180)'; qSweep = quaternion([zeros(numel(eulerSweep),2),eulerSweep], ... "eulerd","ZYX","frame");
Convierte q0, q90 y qSweep en matrices de rotación. En un bucle, calcule la métrica a minimizar para cada miembro del barrido del cuaternión. Trazar los resultados y devolver el valor del barrido de Euler que corresponde al mínimo de la métrica.
r0 = rotmat(q0,"frame"); r90 = rotmat(q90,"frame"); rSweep = rotmat(qSweep,"frame"); metricToMinimize = zeros(size(rSweep,3),1); for i = 1:numel(qSweep) metricToMinimize(i) = norm((rSweep(:,:,i) - r0),"fro").^2 + ... norm((rSweep(:,:,i) - r90),"fro").^2; end plot(eulerSweep,metricToMinimize) xlabel("Euler Sweep (degrees)") ylabel("Metric to Minimize")
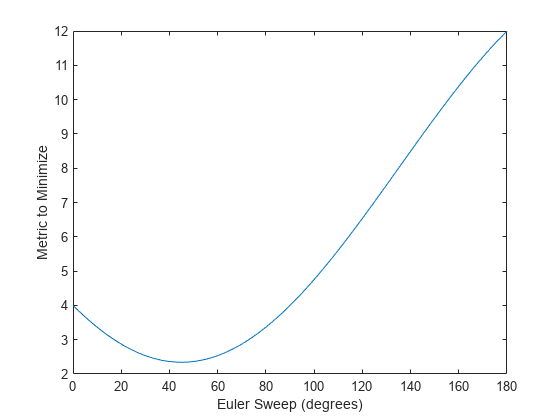
[~,eulerIndex] = min(metricToMinimize); eulerSweep(eulerIndex)
ans = 45
El mínimo de la métrica corresponde al barrido del ángulo de Euler a 45 grados. Es decir, meanrot define el promedio entre quaterion([0 0 0],"ZYX","frame") y quaternion([0 0 90],"ZYX","frame") como quaternion([0 0 45],"ZYX","frame"). Llame a meanrot con q0 y q90 para verificar el mismo resultado.
eulerd(meanrot([q0,q90]),"ZYX","frame")
ans = 1×3
0 0 45.0000
Limitaciones
La métrica que utiliza meanrot para determinar la rotación media no es única para cuaterniones significativamente separados. Repita el experimento anterior para cuaterniones que estén separados por 180 grados.
q180 = quaternion([0 0 180],"eulerd","ZYX","frame"); r180 = rotmat(q180,"frame"); for i = 1:numel(qSweep) metricToMinimize(i) = norm((rSweep(:,:,i) - r0),"fro").^2 + ... norm((rSweep(:,:,i) - r180),"fro").^2; end plot(eulerSweep,metricToMinimize) xlabel("Euler Sweep (degrees)") ylabel("Metric to Minimize")
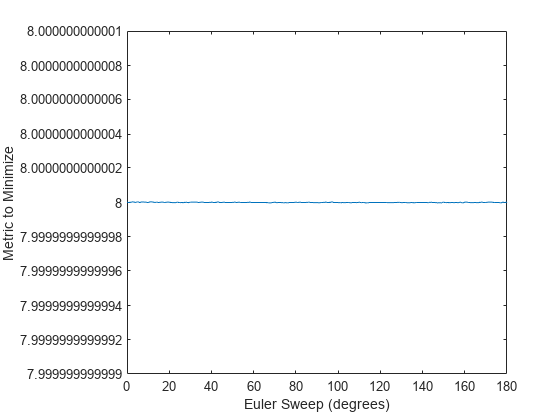
[~,eulerIndex] = min(metricToMinimize); eulerSweep(eulerIndex)
ans = 49
Las medias de los cuaterniones generalmente se calculan para rotaciones cercanas entre sí, lo que hace que el caso extremo que se muestra en este ejemplo sea poco probable en aplicaciones del mundo real. Para promediar dos cuaterniones que están significativamente separados, utilice la función slerp. Repita el experimento usando slerp y verifique que la media del cuaternión devuelta sea más intuitiva para distancias grandes.
qMean = slerp(q0,q180,0.5); q0_q180 = eulerd(qMean,"ZYX","frame")
q0_q180 = 1×3
0 0 90.0000
Argumentos de entrada
Argumentos de salida
Algoritmos
meanrot determina una media de cuaternión, , según [1]. es el cuaternión que minimiza la norma de Frobenius al cuadrado de la diferencia entre matrices de rotación:
Referencias
[1] Markley, F. Landis, Yang Chen, John Lucas Crassidis, and Yaakov Oshman. "Average Quaternions." Journal of Guidance, Control, and Dynamics. Vol. 30, Issue 4, 2007, pp. 1193-1197.
Capacidades ampliadas
Historial de versiones
Introducido en R2019b