analyticalInverseKinematics
Crear un solver de cinemática inversa analítica
Descripción
El objeto analyticalInverseKinematics genera funciones que calculan todas las soluciones de la cinemática inversa (IK) en forma cerrada para manipuladores de cadenas en serie. El objeto utiliza un enfoque basado en el método de Pieper [1] para generar una función personalizada para encontrar múltiples configuraciones de articulaciones distintas que consigan la pose del efector final deseada para un grupo cinemático de un modelo de robot de árbol de cuerpo rígido. Esto es aplicable a un grupo cinemático de un modelo de robot de árbol de cuerpo rígido, siempre y cuando el grupo cinemático especificado represente un manipulador en serie de seis DOF con una muñeca y parámetros cinemáticos compatibles. Una muñeca se define como tres articulaciones rotacionales consecutivas con ejes ortogonales.
Estos son los elementos clave del solver:
Modelo de robot: modelo de árbol de cuerpo rígido que define la cinemática del robot. Especifique este modelo como objeto
rigidBodyTreecuando cree el solver.Grupo cinemático: nombres de cuerpo de la base y del efector final para una cadena en serie de seis DOF que forma parte del modelo de robot. Para establecer este parámetro, utilice la función
showdetails.Tipo de grupo cinemático: clasificación de las articulaciones que conectan la base al efector final.
Para ver todos los posibles grupos cinemáticos admitidos para el robot, utilice la función de objeto showdetails. Para establecer un grupo específico de la lista, haga clic en el enlace Use this kinematic group de un grupo cinemático de la lista devuelta.
Para calcular la cinemática inversa de un grupo cinemático específico, utilice la función de objeto generateIKFunction. Para asegurarse de que el modelo del robot y el grupo cinemático son compatibles, compruebe la propiedad IsValidGroupForIK después de seleccionar un grupo cinemático.
Para generar soluciones numéricas, utilice los objetos inverseKinematics y generalizedInverseKinematics.
Creación
Sintaxis
Descripción
analyticalIK = analyticalInverseKinematics( crea un solver de cinemática inversa analítica para un modelo de robot de árbol de cuerpo rígido, especificado como un objeto robotRBT)rigidBodyTree. El efector final es el cuerpo final que figura en la propiedad Bodies del modelo de robot. El argumento robotRBT establece la propiedad RigidBodyTree.
analyticalIK = analyticalInverseKinematics( establece la propiedad KinematicGroup en el argumento robotRBT,'KinematicGroup',kinGroup)kinGroup, especificado como una estructura.
Propiedades
Funciones del objeto
generateIKFunction | Generate function for closed-form inverse kinematics |
showdetails | Display overview of available kinematic groups |
Ejemplos
Cargue el robot y cree el objeto de cinemática inversa analítica.
robot = loadrobot("abbIrb120",DataFormat="row"); aik = analyticalInverseKinematics(robot);
Genere la función de IK.
aikFcn = generateIKFunction(aik,"ikAbbIRB120");Resuelva configuraciones factibles para dos poses de efector final diferentes.
eePose1 = trvec2tform([0 0.25 0.25]); configs1 = aikFcn(eePose1)
configs1 = 2×6
1.8512 0.4827 0.8659 -1.2969 1.6318 2.9278
1.8512 0.4827 0.8659 1.8447 -1.6318 -0.2138
eePose2 = trvec2tform([0 -0.25 0.5]); configs2 = aikFcn(eePose2)
configs2 = 2×6
-1.8512 -0.1663 0.5766 1.4564 1.8274 4.2873
-1.8512 -0.1663 0.5766 -1.6852 -1.8274 1.1457
Genere soluciones de cinemática inversa (IK) de forma cerrada para un efector final deseado. Cargue el modelo de robot proporcionado e inspeccione los detalles sobre los grupos cinemáticos factibles de los cuerpos de la base y del efector final. Genere una función para el grupo cinemático deseado. Inspeccione las distintas configuraciones para una pose específica del efector final.
Modelo de robot
Cargue el modelo de robot ABB IRB 120 en el área de trabajo. Muestre el modelo.
robot = loadrobot('abbIrb120','DataFormat','row'); show(robot);
IK analítica
Cree el solver de IK analítica. Muestre los detalles del modelo de robot, que enumera los diferentes grupos cinemáticos disponibles para las soluciones de IK analítica de forma cerrada. Seleccione el segundo grupo cinemático haciendo clic en el enlace Use this kinematic group en la segunda fila de la tabla.
aik = analyticalInverseKinematics(robot); showdetails(aik)
--------------------
Robot: (8 bodies)
Index Base Name EE Body Name Type Actions
----- --------- ------------ ---- -------
1 base_link link_6 RRRSSS Use this kinematic group
2 base_link tool0 RRRSSS Use this kinematic group
Inspeccione el grupo cinemático, que enumera los nombres de cuerpo de la base y del efector final. Para este robot, el grupo utiliza los cuerpos base_link' y 'tool0', respectivamente.
aik.KinematicGroup
ans = struct with fields:
BaseName: 'base_link'
EndEffectorBodyName: 'tool0'
Generar función
Genere la función de IK para el grupo cinemático seleccionado. Especifique un nombre para la función, que se genera y se guarda en el directorio actual.
generateIKFunction(aik,'robotIK');Especifique la posición deseada del efector final. Convierta la posición xyz a una transformación homogénea.
eePosition = [0 0.5 0.5]; eePose = trvec2tform(eePosition); hold on plotTransforms(eePosition,tform2quat(eePose)) hold off
Generar la configuración para la solución de IK
Especifique la transformación homogénea a la función de IK generada, que genera todas las soluciones para la pose deseada del efector final. Muestre la primera configuración generada para comprobar que se ha alcanzado la pose deseada.
ikConfig = robotIK(eePose); % Uses the generated file show(robot,ikConfig(1,:)); hold on plotTransforms(eePosition,tform2quat(eePose)) hold off
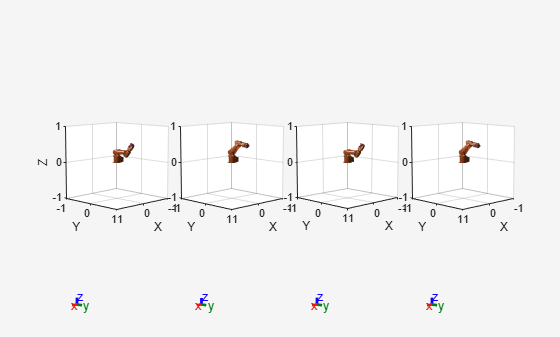
Muestre todas las soluciones de IK de forma cerrada secuencialmente.
figure; numSolutions = size(ikConfig,1); for i = 1:size(ikConfig,1) subplot(1,numSolutions,i) show(robot,ikConfig(i,:)); end
Algunos modelos de manipuladores robóticos tienen grados de libertad (DOF) amplios. Sin embargo, para alcanzar determinadas poses del efector final, solo se necesitan seis DOF. Utilice el objeto analyticalInverseKinematics, que admite robots de seis DOF, para determinar varios grupos cinemáticos válidos para este modelo de robot de gran DOF. Utilice la función de objeto showdetails para obtener información sobre el modelo.
Cargar el modelo de robot y generar el solver de IK
Cargue el modelo de robot en el área de trabajo y cree un objeto analyicalInverseKinematics. Utilice la función de objeto showdetails para ver los grupos cinemáticos admitidos.
robot = loadrobot("willowgaragePR2",DataFormat="row"); aik = analyticalInverseKinematics(robot); opts = showdetails(aik);
--------------------
Robot: (94 bodies)
Index Base Name EE Body Name Type Actions
----- --------- ------------ ---- -------
1 l_shoulder_pan_link l_wrist_roll_link RSSSSS Use this kinematic group
2 r_shoulder_pan_link r_wrist_roll_link RSSSSS Use this kinematic group
3 l_shoulder_pan_link l_gripper_palm_link RSSSSS Use this kinematic group
4 r_shoulder_pan_link r_gripper_palm_link RSSSSS Use this kinematic group
5 l_shoulder_pan_link l_gripper_led_frame RSSSSS Use this kinematic group
6 l_shoulder_pan_link l_gripper_motor_accelerometer_link RSSSSS Use this kinematic group
7 l_shoulder_pan_link l_gripper_tool_frame RSSSSS Use this kinematic group
8 r_shoulder_pan_link r_gripper_led_frame RSSSSS Use this kinematic group
9 r_shoulder_pan_link r_gripper_motor_accelerometer_link RSSSSS Use this kinematic group
10 r_shoulder_pan_link r_gripper_tool_frame RSSSSS Use this kinematic group
Seleccione un grupo programáticamente utilizando la salida de la función de objeto showdetails, opts. El grupo seleccionado utiliza el hombro izquierdo como base y la muñeca izquierda como efector final.
aik.KinematicGroup = opts(1).KinematicGroup; disp(aik.KinematicGroup)
BaseName: 'l_shoulder_pan_link'
EndEffectorBodyName: 'l_wrist_roll_link'
Genere la función de IK para el grupo seleccionado.
generateIKFunction(aik,"willowRobotIK");Resolver la IK analítica
Defina una pose del efector final objetivo utilizando una configuración generada aleatoriamente.
rng(0); expConfig = randomConfiguration(robot); eeBodyName = aik.KinematicGroup.EndEffectorBodyName; baseName = aik.KinematicGroup.BaseName; expEEPose = getTransform(robot,expConfig,eeBodyName,baseName);
Resuelva todas las configuraciones del robot que alcancen la pose definida del efector final utilizando la función de IK generada. Para ignorar los límites de articulación, especifique false como segundo argumento de entrada.
ikConfig = willowRobotIK(expEEPose,false);
Para mostrar la pose del efector final objetivo en el marco de referencia del mundo, obtenga la transformación a partir de la base del modelo de robot en lugar de a partir de la base del grupo cinemático.
eeWorldPose = se3(getTransform(robot,expConfig,eeBodyName)); generatedConfig = repmat(expConfig,size(ikConfig,1),1); generatedConfig(:,aik.KinematicGroupConfigIdx) = ikConfig;
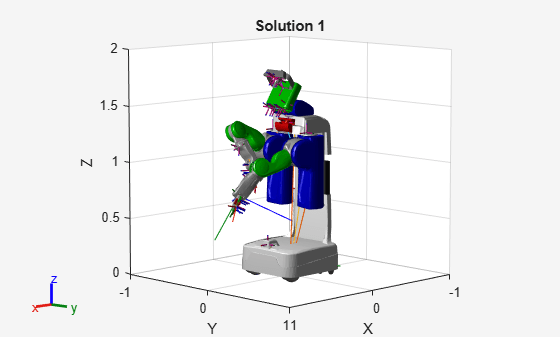
Muestre la primera solución de IK generada.
ax = show(robot,generatedConfig(1,:)); hold on plotTransforms(eeWorldPose,Parent=ax,FrameSize=0.5); axis([-1 1 -1 1 0 2]) title("Solution 1");
Referencias
[1] Pieper, Donald. The Kinematics of Manipulators Under Computer Control. Stanford University, 1968.
Capacidades ampliadas
Historial de versiones
Introducido en R2020b