inverseKinematics
Crear un solver de cinemática inversa
Descripción
El System object™ inverseKinematics crea un solver de cinemática inversa (IK) para calcular las configuraciones de articulaciones de la pose del efector final deseada a partir de un modelo de árbol de cuerpo rígido especificado. Cree un modelo de árbol de cuerpo rígido para el robot mediante la clase rigidBodyTree. Este modelo define todas las restricciones de articulación que aplica el solver. Si hay una solución posible, se obedecen los límites de articulación especificados en el modelo de robot.
El solver de IK utiliza un enfoque de optimización basado en gradiente descendente para encontrar una configuración de articulación que sea un mínimo local de la función objetivo de error cuadrado de pose ponderada:
donde:
w es el vector de ponderación de seis elementos. Puede especificarlo utilizando el argumento
weightspara priorizar la importancia relativa entre componentes de orientación y traslación.es una función con valores vectoriales que representa el error de pose de seis elementos entre la pose deseada Tdes del efector final y la pose del efector final calculada mediante cinemática directa.
FK es una función de cinemática directa que calcula la pose en una configuración de articulación q para el eslabón efector final ee_link del robot.
Para especificar otras restricciones diferentes de la pose del efector final, incluidas restricciones de apuntamiento, límites de posición u objetivos de orientación, considere usar generalizedInverseKinematics. Este objeto permite calcular soluciones de IK multirestricciones.
Para obtener soluciones de IK analíticas de forma cerrada, consulte analyticalInverseKinematics.
Para calcular configuraciones de articulaciones para la pose del efector final deseada:
Cree el objeto
inverseKinematicsy configure sus propiedades.Llame al objeto con argumentos, como si fuera una función.
Para más información sobre el funcionamiento de los System objects, consulte ¿Qué son los System Objects?
Creación
Descripción
ik = inverseKinematicsRigidBodyTree.
ik = inverseKinematics(PropertyName=Value)SolverAlgorithm="fminconsqp" utiliza el solver SQP fmincon como solver de cinemática inversa.
Propiedades
Uso
Descripción
[ busca una configuración de articulación que alcanza la pose del efector final especificada. Especifique una estimación inicial para la configuración y las ponderaciones deseadas en las tolerancias de los seis componentes de configSol,solInfo] = ik(endeffector,pose,weights,initialguess)pose. La información de la solución relativa a la ejecución del algoritmo, solInfo, se devuelve con la solución de la configuración de articulación, configSol.
Argumentos de entrada
Argumentos de salida
Funciones del objeto
Para usar una función de objeto, especifique el System object como el primer argumento de entrada. Por ejemplo, para liberar recursos de sistema de un System object llamado obj, utilice la siguiente sintaxis:
release(obj)
Ejemplos
Cargue un manipulador PUMA 560 de Robotics System Toolbox™ loadrobot.
puma = loadrobot("puma560");Establezca la posición deseada del efector final y conviértala en una matriz de transformación homogénea SE(3).
pos = [-0.5 0.5 0.75]; eePoseTF = trvec2tform(pos);
Cree el solver de IK y establezca las ponderaciones de manera que el solver priorice alcanzar la posición xyz deseada frente a la orientación deseada. Utilice la configuración de articulación inicial como estimación inicial para el solver.
ik = inverseKinematics("RigidBodyTree",puma);
weights = [0 0 0 1 1 1];
initialguess = homeConfiguration(puma);Resuelva la IK para el efector final del modelo de robot, link7.
[configSoln,solnInfo] = ik("link7",eePoseTF,weights,initialguess);Muestre la configuración de la solución generada, que ahora alcanza la posición objetivo.
show(puma,configSoln); hold on plotTransforms(pos,eul2quat([0 0 0]),FrameSize=0.3); axis auto padded title("End-Effector Target Position Achieved")

Observe que para la mayoría de los problemas de IK, existen múltiples configuraciones que pueden alcanzar la pose objetivo deseada. Dado que el solver se basa en optimización, podría aproximarse a una solución que en realidad no alcanza la pose deseada. Si esto ocurre, el solver se reinicia automáticamente y utiliza una configuración aleatoria como estimación inicial. Esto significa que ejecutar la función más de una vez para la misma pose objetivo podría generar diferentes configuraciones que alcancen la pose objetivo. Para evitar la aleatoriedad, puede establecer la semilla del generador de números aleatorios o puede utilizar una estimación inicial que se acerque más a la solución, deshabilitando al mismo tiempo AllowRandomRestart.
ik.SolverParameters.AllowRandomRestart = false
Si debe encontrar todas las soluciones posibles, utilice el objeto analyticalInverseKinematics.
Cargue un robot y cree un solver de cinemática inversa para él. Establezca el algoritmo del solver en el algoritmo SQP fmincon.
robot = loadrobot("universalUR5",DataFormat="row"); ik = inverseKinematics(RigidBodyTree=robot,SolverAlgorithm="fminconsqp");
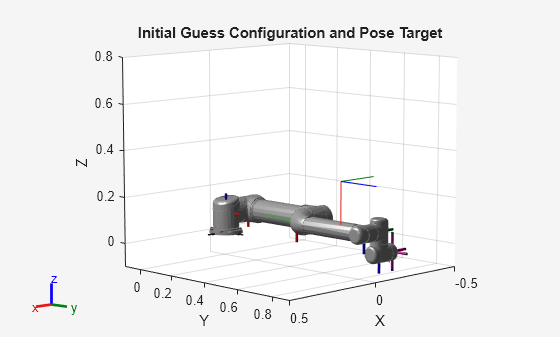
Establezca el último cuerpo del robot como efector final, establezca una pose objetivo, establezca las ponderaciones y establezca la configuración de estimación inicial.
ee = robot.BodyNames{end};
poseTarget = se3([0 pi/2 -pi/2],"eul","ZYX",[0 0.7 0.3]);
weights = [1 1 1 0.8 0.8 0.8];
initGuessConfig = [pi/2 0 0 0 0 0];Muestre el robot en la configuración de la estimación inicial y represente la pose objetivo.
show(robot,initGuessConfig); axis([-0.5 0.5 -0.1 0.9 -0.1 0.8]) hold on plotTransforms(poseTarget,FrameSize=0.2); title("Initial Guess Configuration and Pose Target")
Resuelva una configuración que alcance la pose objetivo utilizando las ponderaciones especificadas y la configuración de estimación inicial.
[config,solninfo] = ik(ee,tform(poseTarget),weights,initGuessConfig); show(robot,config,PreservePlot=false); title("End-Effector Target Pose Achieved") hold off
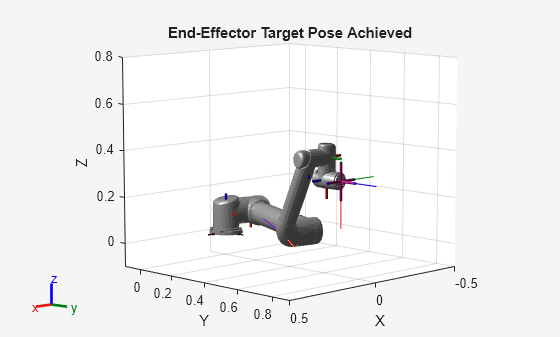
solninfo.Status
ans = 'success'
Referencias
[1] Badreddine, Hassan, Stefan Vandewalle, and Johan Meyers. "Sequential Quadratic Programming (SQP) for Optimal Control in Direct Numerical Simulation of Turbulent Flow." Journal of Computational Physics. 256 (2014): 1–16. doi:10.1016/j.jcp.2013.08.044.
[2] Bertsekas, Dimitri P. Nonlinear Programming. Belmont, MA: Athena Scientific, 1999.
[3] Goldfarb, Donald. "Extension of Davidon’s Variable Metric Method to Maximization Under Linear Inequality and Equality Constraints." SIAM Journal on Applied Mathematics. Vol. 17, No. 4 (1969): 739–64. doi:10.1137/0117067.
[4] Nocedal, Jorge, and Stephen Wright. Numerical Optimization. New York, NY: Springer, 2006.
[5] Sugihara, Tomomichi. "Solvability-Unconcerned Inverse Kinematics by the Levenberg–Marquardt Method." IEEE Transactions on Robotics Vol. 27, No. 5 (2011): 984–91. doi:10.1109/tro.2011.2148230.
[6] Zhao, Jianmin, and Norman I. Badler. "Inverse Kinematics Positioning Using Nonlinear Programming for Highly Articulated Figures." ACM Transactions on Graphics Vol. 13, No. 4 (1994): 313–36. doi:10.1145/195826.195827.