lidarScan
Crear un objeto para almacenar el escaneo de LiDAR 2D
Descripción
Un objeto lidarScan contiene los datos de un solo escaneo de LiDAR (detección y distancia por luz) 2D. El escaneo de LiDAR es un escaneo láser de un plano 2D con distancias (Ranges) medidas desde el sensor hasta los obstáculos del entorno en ángulos específicos (Angles). Utilice este objeto de escaneo láser como entrada a otros algoritmos de robótica como matchScans (Navigation Toolbox), controllerVFH (Navigation Toolbox) o monteCarloLocalization (Navigation Toolbox).
Creación
Descripción
scan = lidarScan(ranges,angles)lidarScan a partir de ranges y angles, que representan los datos recopilados de un sensor de LiDAR. Las entradas de ranges y angles son vectores de la misma longitud y se establecen directamente en las propiedades Ranges y Angles.
scan = lidarScan(cart)lidarScan mediante las coordenadas cartesianas de entrada como una matriz n por 2. La propiedad Cartesian se establece directamente desde esta entrada.
scan = lidarScan(scanMsg)lidarScan a partir de un objeto de mensaje LaserScan (ROS Toolbox) ROS.
Propiedades
Funciones del objeto
plot | Display laser or lidar scan readings |
removeInvalidData | Remove invalid range and angle data |
transformScan | Transform laser scan based on relative pose |
Ejemplos
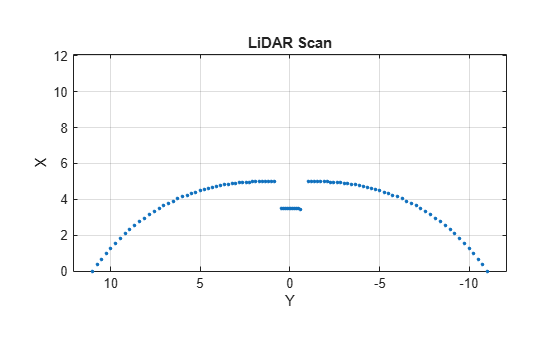
Especifique los datos de LiDAR como vectores de alcances y ángulos. Estos valores incluyen lecturas fuera del alcance de los sensores.
x = linspace(-2,2); ranges = abs((1.5).*x.^2 + 5); ranges(45:55) = 3.5; angles = linspace(-pi/2,pi/2,numel(ranges));
Cree un escaneo de LiDAR especificando los alcances y los ángulos. Represente todos los puntos del escaneo de LiDAR.
scan = lidarScan(ranges,angles); plot(scan)
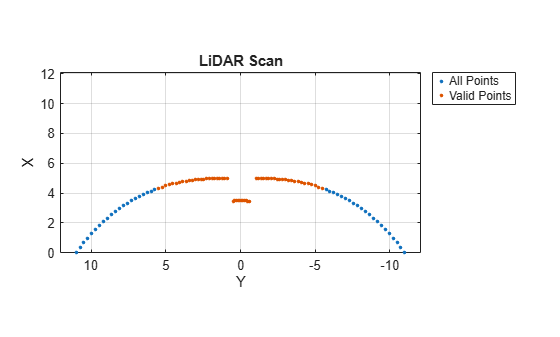
Elimine los puntos no válidos en base a un alcance mínimo y máximo especificado.
minRange = 0.1; maxRange = 7; scan2 = removeInvalidData(scan,'RangeLimits',[minRange maxRange]); hold on plot(scan2) legend('All Points','Valid Points')
Cree un objeto lidarScan. Especifique los alcances y los ángulos como vectores.
refRanges = 5*ones(1,300); refAngles = linspace(-pi/2,pi/2,300); refScan = lidarScan(refRanges,refAngles);
Traslade el escaneo láser con un desplazamiento de [x y] de (0.5,0.2).
transformedScan = transformScan(refScan,[0.5 0.2 0]);
Gire el escaneo láser 20 grados.
rotateScan = transformScan(refScan,[0,0,deg2rad(20)]);
Capacidades ampliadas
Historial de versiones
Introducido en R2019b