matchScans
Estimar la pose entre dos escaneos láser.
Sintaxis
Descripción
pose = matchScans(currRanges,currAngles,refRanges,refAngles)
[___] = matchScans(___,Name,Value) especifica opciones adicionales especificadas por uno o más argumentos de par Name,Value.
Ejemplos
Cree un escaneo LiDAR de referencia utilizando lidarScan. Especifique rangos y ángulos como vectores.
refRanges = 5*ones(1,300); refAngles = linspace(-pi/2,pi/2,300); refScan = lidarScan(refRanges,refAngles);
Usando la función transformScan (Robotics System Toolbox), genere un segundo escaneo LiDAR con un desplazamiento x,y de (0.5,0.2).
currScan = transformScan(refScan,[0.5 0.2 0]);
Haga coincidir el escaneo de referencia y el segundo escaneo para estimar la diferencia de pose entre ellos.
pose = matchScans(currScan,refScan);
Utilice la función transformScan para alinear los escaneos transformando el segundo escaneo en el marco del primer escaneo usando la diferencia de pose relativa. Traza tanto los escaneos originales como los escaneos alineados.
currScan2 = transformScan(currScan,pose); subplot(2,1,1); hold on plot(currScan) plot(refScan) title('Original Scans') hold off subplot(2,1,2); hold on plot(currScan2) plot(refScan) title('Aligned Scans') xlim([0 5]) hold off

Este ejemplo utiliza el algoritmo solucionador 'fminunc' para realizar la coincidencia de escaneo. Este algoritmo de solver requiere una licencia de Optimization Toolbox™ .
Especifique un escaneo láser de referencia como rangos y ángulos.
refRanges = 5*ones(1,300); refAngles = linspace(-pi/2,pi/2,300);
Usando la función transformScan (Robotics System Toolbox), genere un segundo escaneo láser con un desplazamiento x,y de (0.5,0.2).
[currRanges,currAngles] = transformScan(refRanges,refAngles,[0.5 0.2 0]);
Haga coincidir el escaneo de referencia y el segundo escaneo para estimar la diferencia de pose entre ellos.
pose = matchScans(currRanges,currAngles,refRanges,refAngles,'SolverAlgorithm','fminunc');
Mejore la estimación dando una estimación de pose inicial.
pose = matchScans(currRanges,currAngles,refRanges,refAngles,... 'SolverAlgorithm','fminunc','InitialPose',[-0.4 -0.1 0]);
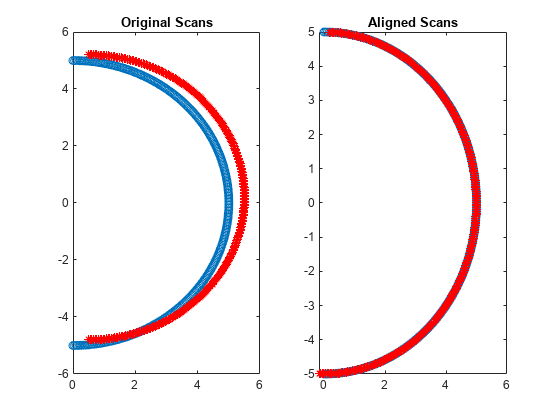
Utilice la función transformScan para alinear los escaneos transformando el segundo escaneo en el marco del primer escaneo usando la diferencia de pose relativa. Traza tanto los escaneos originales como los escaneos alineados.
[currRanges2,currAngles2] = transformScan(currRanges,currAngles,pose); [x1, y1] = pol2cart(refAngles,refRanges); [x2, y2] = pol2cart(currAngles,currRanges); [x3, y3] = pol2cart(currAngles2,currRanges2); subplot(1,2,1) plot(x1,y1,'o',x2,y2,'*r') title('Original Scans') subplot(1,2,2) plot(x1,y1,'o',x3,y3,'*r') title('Aligned Scans')
Argumentos de entrada
Argumentos de par nombre-valor
Argumentos de salida
Referencias
[1] Biber, P., and W. Strasser. "The Normal Distributions Transform: A New Approach to Laser Scan Matching." Intelligent Robots and Systems Proceedings. 2003.
[2] Magnusson, Martin. "The Three-Dimensional Normal-Distributions Transform -- an Efficient Representation for Registration, Surface Analysis, and Loop Detection." PhD Dissertation. Örebro University, School of Science and Technology, 2009.
Capacidades ampliadas
Historial de versiones
Introducido en R2019b