Mapeo y localización
Mapeo con escaneo de LiDAR y localización por filtro de partículas
Cree mapas de entornos utilizando cuadrículas de ocupación y realice localización mediante un algoritmo de estimación bayesiano recursivo basado en muestreo utilizando los datos del sensor de LiDAR desde el robot.
Funciones
Temas
Mapeo
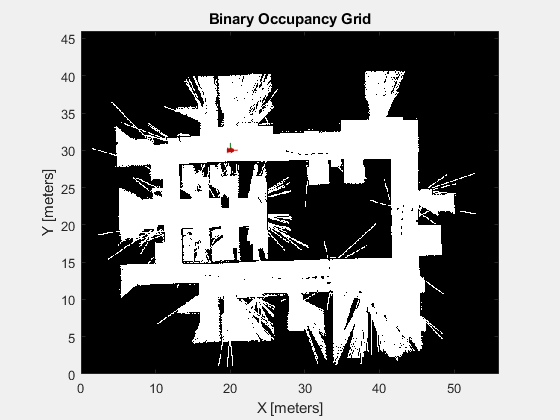
- Cuadrículas de ocupación
Detalles de la funcionalidad de cuadrícula de ocupación y la estructura de mapa.
Estimación de estados
- Particle Filter Parameters
To use thestateEstimatorPFparticle filter, you must specify parameters such as the number of particles, the initial particle location, and the state estimation method. - Particle Filter Workflow
A particle filter is a recursive, Bayesian state estimator that uses discrete particles to approximate the posterior distribution of the estimated state.
Ejemplos destacados

Crear mapas con poses conocidas
Cree un mapa de un entorno usando lecturas del sensor de distancia y poses del robot para un robot de tracción diferencial.

Realizar el seguimiento de un robot tipo automóvil utilizando un filtro de partículas
Utilice un filtro de partículas de estimación de estados para reducir los efectos del ruido y lograr una estimación más precisa de la pose de robot.
Evadir obstáculos con reinforcement learning para robots móviles
Utilice reinforcement learning basado en DDPG para desarrollar una estrategia de evasión de obstáculos para un robot móvil.