tf2zpk
Convertir parámetros de filtros de función de transferencia a una forma de polos, ceros y ganancia
Sintaxis
Descripción
[ encuentra el vector de ceros z,p,k] = tf2zpk(b,a)z, el vector de polos p y la ganancia asociada k de los parámetros de función de transferencia b y a. La función convierte una representación de una función de transferencia polinómica
de un sistema de tiempo discreto de una única entrada y una única salida (SISO) a una forma de función de transferencia de factores
Nota
Utilice tf2zpk cuando trabaje con funciones de transferencia expresadas en potencias de z–1. Una función similar, tf2zp, es más útil para trabajar con potencias de s, como funciones de transferencia de tiempo continuo.
Ejemplos
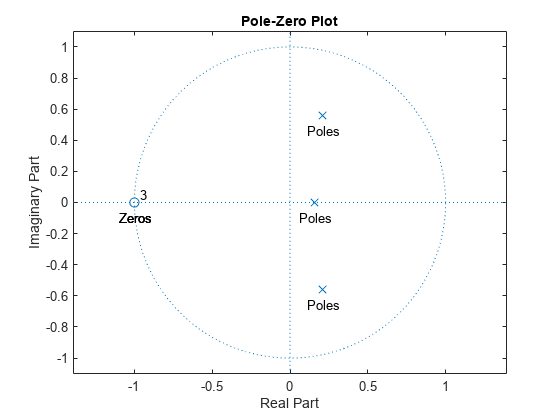
Diseñe un filtro Butterworth de tercer orden con una frecuencia de corte normalizada de rad/muestra. Encuentre los polos, ceros y ganancia del filtro.
[b,a] = butter(3,0.4); [z,p,k] = tf2zpk(b,a)
z = 3×1 complex
-1.0000 + 0.0000i
-1.0000 - 0.0000i
-1.0000 + 0.0000i
p = 3×1 complex
0.2094 + 0.5582i
0.2094 - 0.5582i
0.1584 + 0.0000i
k = 0.0985
Represente gráficamente los polos y los ceros para verificar que están donde se espera.
zplane(b,a) text(real(z)-0.1,imag(z)-0.1,"Zeros") text(real(p)-0.1,imag(p)-0.1,"Poles")
Argumentos de entrada
Argumentos de salida
Capacidades ampliadas
Historial de versiones
Introducido antes de R2006a