tf2ss
Convertir los parámetros del filtro de la función de transferencia a la forma del espacio de estados
Sintaxis
Descripción
Ejemplos
Considere el sistema descrito por la función de transferencia
Conviértalo en forma de espacio de estados utilizando tf2ss.
b = [0 2 3; 1 2 1]; a = [1 0.4 1]; [A,B,C,D] = tf2ss(b,a)
A = 2×2
-0.4000 -1.0000
1.0000 0
B = 2×1
1
0
C = 2×2
2.0000 3.0000
1.6000 0
D = 2×1
0
1
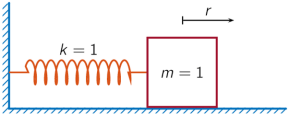
Un sistema oscilante unidimensional de tiempo discreto consiste en una masa unitaria, , unida a una pared por un muelle de constante elástica unitaria. Un sensor muestrea la aceleración, , de la masa a Hz.
Genere 50 muestras de tiempo. Defina el intervalo de muestreo .
Fs = 5; dt = 1/Fs; N = 50; t = dt*(0:N-1); u = [1 zeros(1,N-1)];
La función de transferencia del sistema tiene una expresión analítica:
.
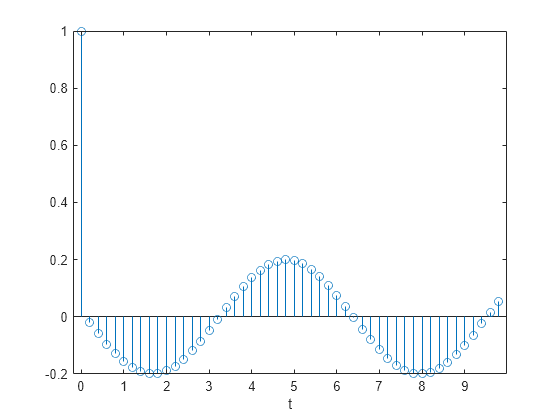
El sistema se estimula mediante un impulso unitario en sentido positivo. Calcule la evolución temporal del sistema utilizando la función de transferencia. Represente el resultado.
bf = [1 -(1+cos(dt)) cos(dt)]; af = [1 -2*cos(dt) 1]; yf = filter(bf,af,u); stem(t,yf,"o") xlabel("t")
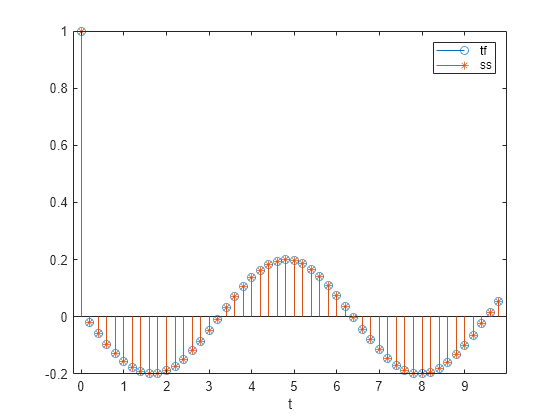
Busque la representación del espacio de estados del sistema. Calcule la evolución temporal partiendo de un estado inicial totalmente nulo. Compárelo con la predicción de la función de transferencia.
[A,B,C,D] = tf2ss(bf,af); x = [0;0]; for k = 1:N y(k) = C*x + D*u(k); x = A*x + B*u(k); end hold on stem(t,y,"*") hold off legend("tf","ss")
Argumentos de entrada
Argumentos de salida
Más acerca de
Capacidades ampliadas
Historial de versiones
Introducido antes de R2006a