getCompSensitivity
Complementary sensitivity function at specified point
using slLinearizer or slTuner interface
Syntax
Description
linsys = getCompSensitivity(s,pt)slLinearizer or slTuner
interface, s.
The software enforces all the permanent openings
specified for s when it calculates
linsys. If you configured either
s.Parameters, or s.OperatingPoints, or
both, getCompSensitivity performs multiple linearizations
and returns an array of complementary sensitivity functions.
linsys = getCompSensitivity(s,pt,temp_opening)temp_opening. Use an opening, for example, to calculate
the complementary sensitivity function of an inner loop with the outer loop
open.
linsys = getCompSensitivity(___,mdl_index)mdl_index specifies the index of the linearizations of
interest, in addition to any of the input arguments in previous syntaxes.
Use this syntax for efficient linearization, when you want to obtain the complementary sensitivity function for only a subset of the batch linearization results.
Examples
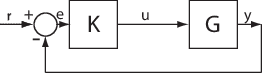
Obtain the complementary sensitivity function, calculated at the plant output, for the ex_scd_simple_fdbk model.
Open the ex_scd_simple_fdbk model.
mdl = 'ex_scd_simple_fdbk';
open_system(mdl);
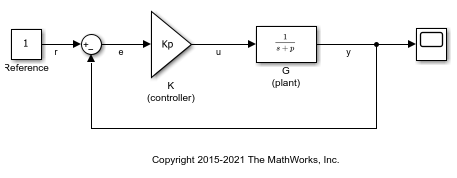
In this model:

Create an slLinearizer interface for the model.
sllin = slLinearizer(mdl);
To calculate the complementary sensitivity function at the plant output, use the y signal as the analysis point. Add this point to sllin.
addPoint(sllin,'y');
Obtain the complementary sensitivity function at y.
sys = getCompSensitivity(sllin,'y');
tf(sys)
ans = From input "y" to output "y": -3 ----- s + 8 Continuous-time transfer function.
The software adds a linearization output at y, followed by a linearization input, dy.
sys is the transfer function from dy to y, which is equal to  .
.
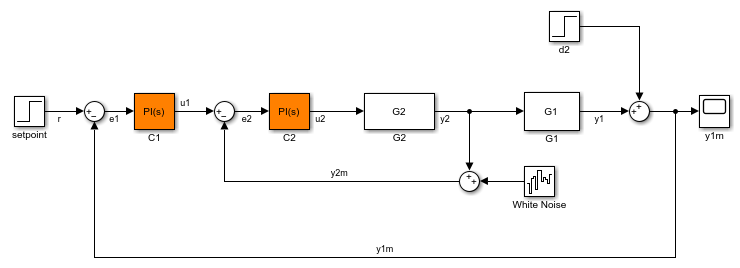
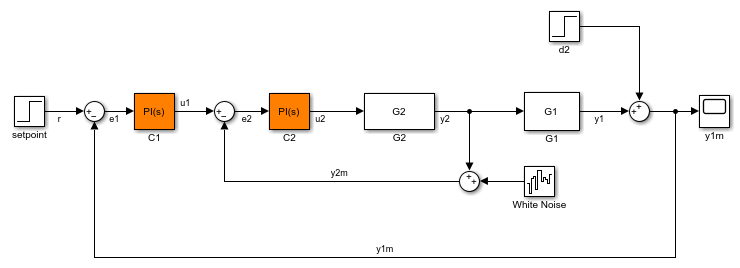
For the scdcascade model, obtain the complementary sensitivity function for the inner-loop at y2.
Open the scdcascade model.
mdl = 'scdcascade';
open_system(mdl)
Create an slLinearizer interface for the model.
sllin = slLinearizer(mdl);
To calculate the complementary sensitivity transfer function for the inner loop at y2, use the y2 signal as the analysis point. To eliminate the effects of the outer loop, break the outer loop at y1m. Add both these points to sllin.
addPoint(sllin,{'y2','y1m'});
Obtain the complementary sensitivity function for the inner loop at y2.
sys = getCompSensitivity(sllin,'y2','y1m');
Here, 'y1m', the third input argument, specifies a temporary opening for the outer loop.
Suppose you batch linearize the scdcascade model for multiple transfer functions. For most linearizations, you vary the proportional (Kp2) and integral gain (Ki2) of the C2 controller in the 10% range. For this example, calculate the complementary sensitivity function for the inner loop for the maximum value of Kp2 and Ki2.
Open the scdcascade model.
mdl = 'scdcascade';
open_system(mdl);
Create an slLinearizer interface for the model.
sllin = slLinearizer(mdl);
Vary the proportional (Kp2) and integral gain (Ki2) of the C2 controller in the 10% range.
Kp2_range = linspace(0.9*Kp2,1.1*Kp2,3); Ki2_range = linspace(0.9*Ki2,1.1*Ki2,5); [Kp2_grid,Ki2_grid]=ndgrid(Kp2_range,Ki2_range); params(1).Name = 'Kp2'; params(1).Value = Kp2_grid; params(2).Name = 'Ki2'; params(2).Value = Ki2_grid; sllin.Parameters = params;
To calculate the complementary sensitivity of the inner loop, use the y2 signal as the analysis point. To eliminate the effects of the outer loop, break the outer loop at y1m. Add both these points to sllin.
addPoint(sllin,{'y2','y1m'})
Determine the index for the maximum values of Ki2 and Kp2.
mdl_index = params(1).Value == max(Kp2_range) & params(2).Value == max(Ki2_range);
Obtain the complementary sensitivity transfer function at y2.
sys = getCompSensitivity(sllin,'y2','y1m',mdl_index);
Open Simulink® model.
mdl = 'watertank';
open_system(mdl)

Create a linearization option set, and set the StoreOffsets option.
opt = linearizeOptions('StoreOffsets',true);
Create slLinearizer interface.
sllin = slLinearizer(mdl,opt);
Add an analysis point at the tank output port.
addPoint(sllin,'watertank/Water-Tank System');
Calculate the complementary sensitivity function at y, and obtain the corresponding linearization offsets.
[sys,info] = getCompSensitivity(sllin,'watertank/Water-Tank System');
View offsets.
info.Offsets
ans =
struct with fields:
dx: [2×1 double]
x: [2×1 double]
u: 1
y: 1
OutputName: {'watertank/Water-Tank System'}
InputName: {'watertank/Water-Tank System'}
StateName: {2×1 cell}
Ts: 0
Input Arguments
Analysis point signal name, specified as:
Character vector or string — Analysis point signal name.
To determine the signal name associated with an analysis point, type
s. The software displays the contents ofsin the MATLAB® command window, including the analysis point signal names, block names, and port numbers. Suppose that an analysis point does not have a signal name, but only a block name and port number. You can specifyptas the block name. To use a point not in the list of analysis points fors, first add the point usingaddPoint.You can specify
ptas a uniquely matching portion of the full signal name or block name. Suppose that the full signal name of an analysis point is'LoadTorque'. You can specifyptas'Torque'as long as'Torque'is not a portion of the signal name for any other analysis point ofs.For example,
pt = 'y1m'.Cell array of character vectors or string array — Specifies multiple analysis point names. For example,
pt = {'y1m','y2m'}.
To calculate linsys, the software adds a linearization output, followed
by a linearization input at pt.
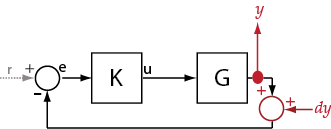
Consider the following model:
Specify pt as 'y':
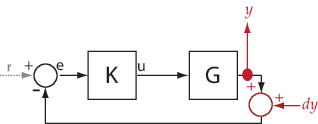
The software computes linsys as the transfer function from
dy to y.
If you specify pt as multiple signals,
for example pt = {'u','y'}, the software adds a
linearization output, followed by a linearization input at each point.
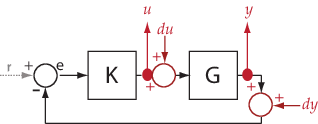
du and dy are linearization inputs, and
u and y are linearization outputs.
The software computes linsys as a MIMO transfer
function with a transfer function from each linearization input to each
linearization output.
Output Arguments
More About
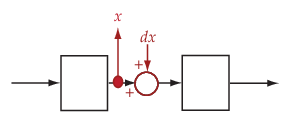
The complementary sensitivity function at a point is the transfer function from an additive disturbance at the point to a measurement at the same point. In contrast to the sensitivity function, the disturbance is added after the measurement.
To compute the complementary sensitivity function at an analysis
point, x, the software adds a linearization output
at x, followed by a linearization input, dx.
The complementary sensitivity function is the transfer function from dx to x.
| Analysis Point in Simulink Model | How getCompSensitivity Interprets
Analysis Point | Complementary Sensitivity Function |
|---|---|---|
|
|
| Transfer function from |
For example, consider the following model where you compute
the complementary sensitivity function at y:
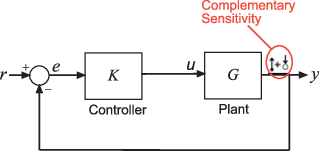
Here, the software adds a linearization output at y,
followed by a linearization input, dy. The complementary
sensitivity function at y, T,
is the transfer function from dy to y. T is
calculated as follows:
Here I is an identity matrix of the same
size as GK.
The complementary sensitivity transfer function at y is
equal to -1 times the closed-loop transfer function
from r to y.
Generally, the complementary sensitivity function, T, computed from
reference signals to plant outputs, is equal to I–S. Here S is the sensitivity function at the
point, and I is the identity matrix of commensurate size.
However, because getCompSensitivity adds the linearization
output and input at the same point, T, as
returned by getCompSensitivity, is equal to S–I.
The software does not modify the Simulink model when it computes the complementary sensitivity function.
Version History
Introduced in R2013bSee Also
slLinearizer | slTuner | addPoint | addOpening | getIOTransfer | getLoopTransfer | getSensitivity