How to Work with SCIs on C2000 MCUs for Debugging | Getting Started with C2000 Microcontroller Blockset, Part 16
From the series: Getting Started with C2000 Microcontroller Blockset
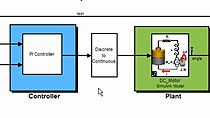
Learn how to use an SCI interface on a TI C2000™ MCU to transmit and receive data back into Simulink® from an F28379D LaunchPad™ to control the signals on the TI C2000 MCU and also read data from the hardware using C2000 Microcontroller Blockset. This is a continuation to another video in this series, “Monitor and Tune GPIOs, ADCs, DACs, and ePWMs on C2000 MCUs.”
Published: 13 Jan 2025
Related Products
Learn More
Featured Product