ga
Encontrar el mínimo de una función mediante un algoritmo genético
Sintaxis
Descripción
x = ga(fun,nvars)x, para la función objetivo, fun. nvars es la dimensión (número de variables de diseño) de fun.
Nota
En Pasar parámetros adicionales se explica cómo pasar parámetros adicionales a la función objetivo y a las funciones de restricción no lineales, si fuera necesario.
x = ga(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon)nonlcon. La función nonlcon acepta x y devuelve los vectores C y Ceq, que representan las desigualdades e igualdades no lineales respectivamente. ga minimiza fun de modo que C(x) ≤ 0 y Ceq(x) = 0. (Establezca lb=[] y ub=[] si no existen límites).
x = ga(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon,intcon)x = ga(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon,intcon,options)intcon tomen valores enteros.
Nota
Cuando hay restricciones de números enteros, ga no acepta restricciones de igualdad no lineal, solo restricciones de desigualdad no lineal.
Ejemplos
El archivo ps_example.m se incluye cuando ejecuta este ejemplo. Represente la función.
xi = linspace(-6,2,300); yi = linspace(-4,4,300); [X,Y] = meshgrid(xi,yi); Z = ps_example([X(:),Y(:)]); Z = reshape(Z,size(X)); surf(X,Y,Z,'MeshStyle','none') colormap 'jet' view(-26,43) xlabel('x(1)') ylabel('x(2)') title('ps\_example(x)')

Encuentra el mínimo de esta función usando ga .
rng default % For reproducibility x = ga(@ps_example,2)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
-4.6793 -0.0860
Utilice el algoritmo genético para minimizar la función ps_example en la región x(1) + x(2) >= 1 y x(2) <= 5 + x(1). Esta función se incluye cuando se ejecuta este ejemplo.
Primero, convierta las dos restricciones de desigualdad a la forma matricial A*x <= b . En otras palabras, obtenga las variables x en el lado izquierdo de la desigualdad y haga que ambas desigualdades sean menores o iguales:
-x(1) -x(2) <= -1
-x(1) + x(2) <= 5
A = [-1,-1;
-1,1];
b = [-1;5];Resuelva el problema restringido usando ga .
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
0.9990 0.0000
Las restricciones se satisfacen dentro del valor predeterminado de la tolerancia de restricción, 1e-3. Para ver esto, calcule A*x' - b, que debe tener componentes negativos.
disp(A*x' - b)
0.0010 -5.9990
Utilice el algoritmo genético para minimizar la función ps_example en la región x(1) + x(2) >= 1 y x(2) == 5 + x(1). Esta función se incluye cuando se ejecuta este ejemplo.
Primero, convierta las dos restricciones a la forma matricial A*x <= b y Aeq*x = beq. En otras palabras, obtenga las variables x en el lado izquierdo de las expresiones y convierta la desigualdad en la forma menor o igual:
-x(1) -x(2) <= -1
-x(1) + x(2) == 5
A = [-1 -1]; b = -1; Aeq = [-1 1]; beq = 5;
Resuelva el problema restringido usando ga .
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b,Aeq,beq)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
-2.0005 2.9995
Verifique que las restricciones se cumplan dentro del valor predeterminado de ConstraintTolerance, 1e-3.
disp(A*x' - b)
1.0000e-03
disp(Aeq*x' - beq)
8.5897e-09
Utilice el algoritmo genético para minimizar la función ps_example en la región x(1) + x(2) >= 1 y x(2) == 5 + x(1). La función ps_example se incluye cuando ejecuta este ejemplo. Además, establezca los límites 1 <= x(1) <= 6 y -3 <= x(2) <= 8.
Primero, convierta las dos restricciones lineales a la forma matricial A*x <= b y Aeq*x = beq. En otras palabras, obtenga las variables x en el lado izquierdo de las expresiones y convierta la desigualdad en la forma menor o igual:
-x(1) -x(2) <= -1
-x(1) + x(2) == 5
A = [-1 -1]; b = -1; Aeq = [-1 1]; beq = 5;
Establezca los límites lb y ub.
lb = [1 -3]; ub = [6 8];
Resuelva el problema restringido usando ga .
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b,Aeq,beq,lb,ub)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
1.0000 6.0000
Verifique que las restricciones lineales se cumplan dentro del valor predeterminado de ConstraintTolerance, 1e-3.
disp(A*x' - b)
-6.0000
disp(Aeq*x' - beq)
-7.9765e-08
Utilice el algoritmo genético para minimizar la función ps_example en la región y . La función ps_example se incluye cuando ejecuta este ejemplo.
Para ello, utilice la función ellipsecons.m que devuelve la restricción de desigualdad en la primera salida, c, y la restricción de igualdad en la segunda salida, ceq. La función ellipsecons se incluye cuando ejecuta este ejemplo. Examine el código ellipsecons.
type ellipseconsfunction [c,ceq] = ellipsecons(x) c = 2*x(1)^2 + x(2)^2 - 3; ceq = (x(1)+1)^2 - (x(2)/2)^4;
Incluya un identificador de función para ellipsecons como argumento nonlcon.
nonlcon = @ellipsecons; fun = @ps_example; rng default % For reproducibility x = ga(fun,2,[],[],[],[],[],[],nonlcon)
Optimization finished: average change in the fitness value less than options.FunctionTolerance and constraint violation is less than options.ConstraintTolerance.
x = 1×2
-0.9766 0.0362
Compruebe que las restricciones no lineales se satisfacen en x . Las restricciones se satisfacen cuando c ≤ 0 y ceq = 0 dentro del valor predeterminado de ConstraintTolerance, 1e-3.
[c,ceq] = nonlcon(x)
c = -1.0911
ceq = 5.4645e-04
Utilice el algoritmo genético para minimizar la función ps_example en la región x(1) + x(2) >= 1 y x(2) == 5 + x(1) utilizando una tolerancia de restricción que sea menor que la predeterminada. La función ps_example se incluye cuando ejecuta este ejemplo.
Primero, convierta las dos restricciones a la forma matricial A*x <= b y Aeq*x = beq. En otras palabras, obtenga las variables x en el lado izquierdo de las expresiones y convierta la desigualdad en la forma menor o igual:
-x(1) -x(2) <= -1
-x(1) + x(2) == 5
A = [-1 -1]; b = -1; Aeq = [-1 1]; beq = 5;
Para obtener una solución más precisa, establezca una tolerancia de restricción de 1e-6. Y para monitorear el progreso del solucionador, configure una función de gráfico.
options = optimoptions('ga','ConstraintTolerance',1e-6,'PlotFcn', @gaplotbestf);
Resolver el problema de minimización.
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b,Aeq,beq,[],[],[],options)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
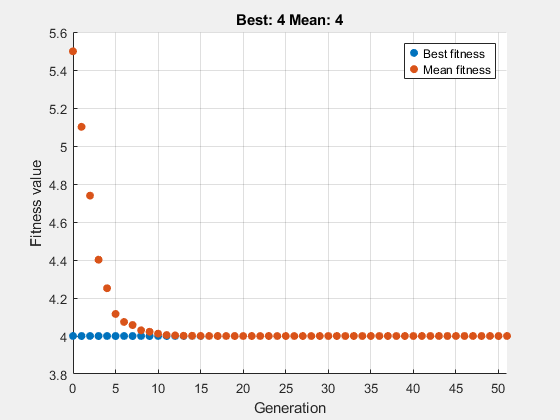
x = 1×2
-2.0000 3.0000
Compruebe que las restricciones lineales se satisfacen dentro de 1e-6.
disp(A*x' - b)
9.9809e-07
disp(Aeq*x' - beq)
-7.3589e-08
Utilice el algoritmo genético para minimizar la función ps_example sujeta a la restricción de que x(1) es un entero. Esta función se incluye cuando se ejecuta este ejemplo.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; x = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon)
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
x = 1×2
-5.0000 -0.0834
Utilice el algoritmo genético para minimizar un problema no lineal restringido a números enteros. Obtenga tanto la ubicación del mínimo como el valor mínimo de la función. La función objetivo, ps_example, se incluye cuando ejecuta este ejemplo.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; [x,fval] = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon)
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
x = 1×2
-5.0000 -0.0834
fval = -1.8344
Compare este resultado con la solución del problema sin restricciones.
[x,fval] = ga(fun,2)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
-4.6906 -0.0078
fval = -1.9918
Utilice el algoritmo genético para minimizar la función ps_example restringida a tener un valor entero x(1). La función ps_example se incluye cuando ejecuta este ejemplo. Para comprender el motivo por el cual el solucionador se detuvo y cómo ga buscó un mínimo, obtenga los resultados exitflag y output. Además, grafique el valor mínimo observado de la función objetivo a medida que avanza el solucionador.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; options = optimoptions('ga','PlotFcn', @gaplotbestf); [x,fval,exitflag,output] = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon,options)
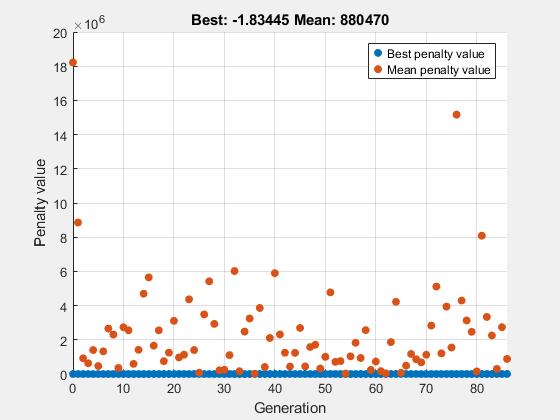
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
x = 1×2
-5.0000 -0.0834
fval = -1.8344
exitflag = 1
output = struct with fields:
problemtype: 'integerconstraints'
rngstate: [1x1 struct]
generations: 86
funccount: 3311
message: 'ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and ...'
maxconstraint: 0
hybridflag: []
Utilice el algoritmo genético para minimizar la función ps_example restringida a tener un valor entero x(1). La función ps_example se incluye cuando ejecuta este ejemplo. Obtenga todas las salidas, incluida la población final y el vector de puntuaciones.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; [x,fval,exitflag,output,population,scores] = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon);
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
Examine los primeros 10 miembros de la población final y sus puntuaciones correspondientes. Tenga en cuenta que x(1) tiene un valor entero para todos estos miembros de la población. El algoritmo entero ga genera únicamente poblaciones factibles para números enteros.
disp(population(1:10,:))
1.0e+03 *
-0.0050 -0.0001
-0.0050 -0.0001
-1.6420 0.0027
-1.5070 0.0010
-0.4540 0.0104
-0.2530 -0.0011
-0.1210 -0.0003
-0.1040 0.1314
-0.0140 -0.0010
0.0160 -0.0002
disp(scores(1:10))
1.0e+06 *
-0.0000
-0.0000
2.6798
2.2560
0.2016
0.0615
0.0135
0.0099
0.0001
0.0000
Argumentos de entrada
Argumentos de salida
Más acerca de
Sugerencias
Para escribir una función con parámetros adicionales a las variables independientes que pueden ser llamadas por
ga, consulte Pasar parámetros adicionales.Para los problemas que utilizan el tipo de población
Double Vector(el predeterminado),gano acepta funciones cuyas entradas sean del tipocomplex. Para resolver problemas que involucran datos complejos, escriba sus funciones de modo que acepten vectores reales, separando las partes reales e imaginarias.
Algoritmos
Para obtener una descripción del algoritmo genético, consulte Cómo funciona el algoritmo genético.
Para obtener una descripción del algoritmo de programación entera mixta, consulte Integer ga Algorithm.
Para obtener una descripción de los algoritmos de restricción no lineal, consulte Algoritmos de resolución de restricciones no lineales para algoritmos genéticos.
Funcionalidad alternativa
App
La tarea Optimize de Live Editor proporciona una interfaz visual para ga.
Referencias
[1] Goldberg, David E., Genetic Algorithms in Search, Optimization & Machine Learning, Addison-Wesley, 1989.
[2] A. R. Conn, N. I. M. Gould, and Ph. L. Toint. “A Globally Convergent Augmented Lagrangian Algorithm for Optimization with General Constraints and Simple Bounds”, SIAM Journal on Numerical Analysis, Volume 28, Number 2, pages 545–572, 1991.
[3] A. R. Conn, N. I. M. Gould, and Ph. L. Toint. “A Globally Convergent Augmented Lagrangian Barrier Algorithm for Optimization with General Inequality Constraints and Simple Bounds”, Mathematics of Computation, Volume 66, Number 217, pages 261–288, 1997.