odeDelay
Description
An odeDelay object defines delays introduced in a differential
equation and the history while solving a delay differential equation (DDE) using an
ode object.
Create an ode object to
represent an ODE problem, and specify an odeDelay object as the value of the
DelayDefinition property to define the delays for the DDE.
Creation
Description
D = odeDelayodeDelay object with empty properties.
D = odeDelay(PropertyName=Value)D
= odeDelay(History=[0.1; 0.5]) defines the solution history [0.1;
0.5] for a DDE.
Properties
Examples
Solve this system of delay differential equations (DDEs) by creating an ode object to represent the problem.
Define the system of DDEs as a local function named ddefun.
function dydt = ddefun(t,y,Z) ydelay1 = Z(:,1); ydelay2 = Z(:,2); dydt = [-2*ydelay1(1) + y(2); y(1) - 2*ydelay2(2)]; end
Specify the system of equations in the ODEFcn property of an ode object. Specify the time delays as a vector [2; 1] and the solution history as a vector [0.1; 0.5] in the DelayDefinition property by using an odeDelay object.
F = ode; F.ODEFcn = @ddefun; F.DelayDefinition = odeDelay(ValueDelay=[2; 1],History=[0.1; 0.5]);
Solve the system of equations over the time interval [0 10] by using the solve method. Plot the results.
S = solve(F,0,10);
plot(S.Time,S.Solution,"-o")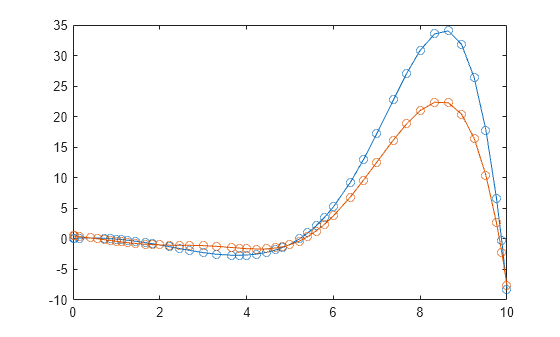
Version History
Introduced in R2025a