ecompass
Orientación a partir de lecturas de magnetómetro y acelerómetro.
Sintaxis
Descripción
La función ecompass calcula la orientación de un sensor utilizando lecturas del magnetómetro y del acelerómetro para rotar cantidades desde un sistema de coordenadas global a un sistema de coordenadas corporales.
orientation = ecompass(accelerometerReading,magnetometerReading)quaternion que puede rotar cantidades de un marco principal (NED) a un marco secundario (sensor).
orientation = ecompass(accelerometerReading,magnetometerReading,orientationFormat)quaternion o matriz de rotación.
orientation = ecompass(accelerometerReading,magnetometerReading,orientationFormat,'ReferenceFrame',RF)RF de la salida orientation.
Ejemplos
Utilice la intensidad del campo magnético conocida y la aceleración adecuada de un dispositivo apuntado al norte verdadero en Boston para determinar la declinación magnética de Boston.
Defina la aceleración conocida y la intensidad del campo magnético en Boston.
magneticFieldStrength = [19.535 -5.109 47.930]; properAcceleration = [0 0 9.8];
Pase la intensidad del campo magnético y la aceleración a la función ecompass. La función ecompass devuelve un operador de rotación de cuaterniones. Convierte el cuaternión a ángulos de Euler en grados.
q = ecompass(properAcceleration,magneticFieldStrength); e = eulerd(q,'ZYX','frame');
El ángulo, e, representa el ángulo entre el norte verdadero y el norte magnético en Boston. Por convención, la declinación magnética es negativa cuando el norte magnético está al oeste del norte verdadero. Nega el ángulo para determinar la declinación magnética.
magneticDeclinationOfBoston = -e(1)
magneticDeclinationOfBoston = -14.6563
La función ecompass fusiona datos del magnetómetro y del acelerómetro para devolver un cuaternión que, cuando se usa dentro de un operador de rotación de cuaternión, puede rotar cantidades de un marco principal (NED) a un marco secundario. La función ecompass también puede devolver matrices de rotación que realizan rotaciones equivalentes al operador cuaternión.
Defina una rotación que pueda llevar un marco principal que apunta al norte magnético a un marco secundario que apunta al norte geográfico. Defina la rotación como un cuaternión y una matriz de rotación. Luego, convierta el cuaternión y la matriz de rotación a ángulos de Euler en grados para comparar.
Defina la intensidad del campo magnético en microteslas en Boston, MA, cuando apunta al norte verdadero.
m = [19.535 -5.109 47.930]; a = [0 0 9.8];
Determine el cuaternión y la matriz de rotación que es capaz de rotar un marco desde el norte magnético al norte verdadero. Muestre los resultados para comparar.
q = ecompass(a,m); quaterionEulerAngles = eulerd(q,'ZYX','frame')
quaterionEulerAngles = 1×3
14.6563 0 0
r = ecompass(a,m,'rotmat');
theta = -asin(r(1,3));
psi = atan2(r(2,3)/cos(theta),r(3,3)/cos(theta));
rho = atan2(r(1,2)/cos(theta),r(1,1)/cos(theta));
rotmatEulerAngles = rad2deg([rho,theta,psi])rotmatEulerAngles = 1×3
14.6563 0 0
Utilice ecompass para determinar el vector de gravedad basándose en datos de una IMU giratoria.
Cargue los datos de la unidad de medida inercial (IMU).
load 'rpy_9axis.mat' sensorData Fs
Determine la orientación del cuerpo del sensor en relación con el marco NED local a lo largo del tiempo.
orientation = ecompass(sensorData.Acceleration,sensorData.MagneticField);
Para estimar el vector de gravedad, primero gire las lecturas del acelerómetro desde el marco del cuerpo del sensor al marco NED utilizando el vector de cuaternión orientation.
gravityVectors = rotatepoint(orientation,sensorData.Acceleration);
Determine el vector de gravedad como un promedio de los vectores de gravedad recuperados a lo largo del tiempo.
gravityVectorEstimate = mean(gravityVectors,1)
gravityVectorEstimate = 1×3
0.0000 -0.0000 10.2102
Fusione datos modelados de acelerómetro y giroscopio para rastrear una plataforma giratoria utilizando datos tanto idealizados como realistas.
Generar una trayectoria de ground-truth
Describa la orientación real de la plataforma a lo largo del tiempo. Utilice kinematicTrajectory System object ™ para crear una trayectoria para una plataforma que no tiene traslación y gira sobre su eje z.
duration = 12;
fs = 100;
numSamples = fs*duration;
accelerationBody = zeros(numSamples,3);
angularVelocityBody = zeros(numSamples,3);
zAxisAngularVelocity = [linspace(0,4*pi,4*fs),4*pi*ones(1,4*fs),linspace(4*pi,0,4*fs)]';
angularVelocityBody(:,3) = zAxisAngularVelocity;
trajectory = kinematicTrajectory('SampleRate',fs);
[~,orientationNED,~,accelerationNED,angularVelocityNED] = trajectory(accelerationBody,angularVelocityBody);Modelo que recibe datos de IMU
Utilice un imuSensor System object para imitar los datos recibidos de una IMU que contiene un magnetómetro ideal y un acelerómetro ideal.
IMU = imuSensor('accel-mag','SampleRate',fs); [accelerometerData,magnetometerData] = IMU(accelerationNED, ... angularVelocityNED, ... orientationNED);
Fusionar datos de IMU para estimar la orientación
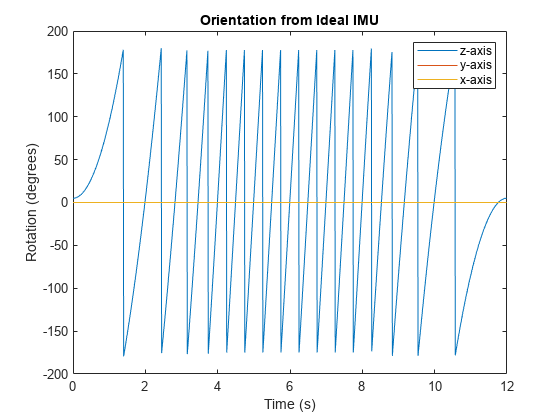
Pase los datos del acelerómetro y del magnetómetro a la función ecompass para estimar la orientación a lo largo del tiempo. Convierta la orientación a ángulos de Euler en grados y trace el resultado.
orientation = ecompass(accelerometerData,magnetometerData); orientationEuler = eulerd(orientation,'ZYX','frame'); timeVector = (0:numSamples-1).'/fs; figure(1) plot(timeVector,orientationEuler) legend('z-axis','y-axis','x-axis') xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation from Ideal IMU')
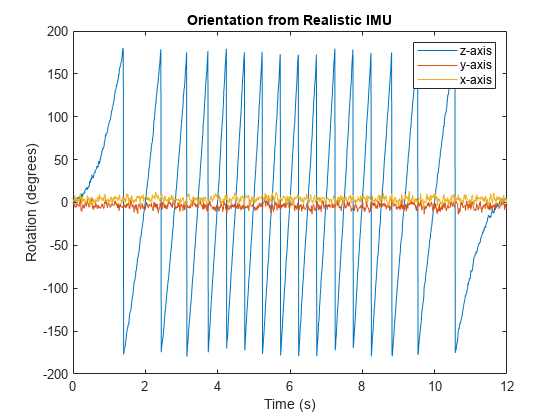
Repita el experimento con un modelo de sensor IMU realista
Modifique los parámetros de IMU System object para aproximarlos a los datos realistas del sensor IMU. Restablezca IMU y luego llámelo con la misma aceleración, velocidad angular y orientación de ground-truth . Utilice ecompass para fusionar los datos de IMU y graficar los resultados.
IMU.Accelerometer = accelparams( ... 'MeasurementRange',20, ... 'Resolution',0.0006, ... 'ConstantBias',0.5, ... 'AxesMisalignment',2, ... 'NoiseDensity',0.004, ... 'BiasInstability',0.5); IMU.Magnetometer = magparams( ... 'MeasurementRange',200, ... 'Resolution',0.01); reset(IMU) [accelerometerData,magnetometerData] = IMU(accelerationNED,angularVelocityNED,orientationNED); orientation = ecompass(accelerometerData,magnetometerData); orientationEuler = eulerd(orientation,'ZYX','frame'); figure(2) plot(timeVector,orientationEuler) legend('z-axis','y-axis','x-axis') xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation from Realistic IMU')
Argumentos de entrada
Argumentos de salida
Algoritmos
La función ecompass devuelve un cuaternión o matriz de rotación que puede rotar cantidades de un marco padre (NED por ejemplo) a un marco hijo (sensor). Para ambos formatos de orientación de salida, el operador de rotación se determina calculando la matriz de rotación.
Primero se calcula la matriz de rotación con un intermediario:
y luego se normalizan columna por columna. a y m son la entrada accelerometerReading y la entrada magnetometerReading, respectivamente.
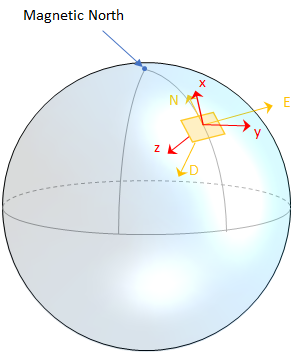
Para comprender el cálculo de la matriz de rotación, considere un punto arbitrario de la Tierra y su correspondiente marco NED local. Supongamos que el cuerpo del sensor tiene un marco, [x,y,z], con el mismo origen.
Recuerde que la orientación de un cuerpo de sensor se define como el operador de rotación (matriz de rotación o cuaternión) necesario para rotar una cantidad desde un marco principal (NED) a un marco secundario (cuerpo de sensor):
dónde
R es una matriz de rotación de 3 por 3, que puede interpretarse como la orientación del marco secundario.
pparent es un vector de 3 por 1 en el marco padre.
pchild es un vector de 3 por 1 en el marco secundario.
Para un cuerpo sensor estable, un acelerómetro devuelve la aceleración debida a la gravedad. Si el cuerpo del sensor está perfectamente alineado con el sistema de coordenadas NED, toda la aceleración debida a la gravedad es a lo largo del eje z y el acelerómetro lee [0 0 1]. Considere la matriz de rotación requerida para rotar una cantidad del sistema de coordenadas NED a una cantidad indicada por el acelerómetro.

La tercera columna de la matriz de rotación corresponde a la lectura del acelerómetro:
La lectura del magnetómetro apunta hacia el norte magnético y está en el plano N-D. Nuevamente, considere el marco del cuerpo de un sensor alineado con el sistema de coordenadas NED.

Por definición, el eje E es perpendicular al plano N-D, por lo tanto, D ⨯ N = E, dentro de cierta escala de amplitud. Si el marco del cuerpo del sensor está alineado con NED, tanto el vector de aceleración del acelerómetro como el vector del campo magnético del magnetómetro se encuentran en el plano N-D. Por lo tanto, a ⨯ m = y, nuevamente con cierta escala de amplitud.
Considere la matriz de rotación necesaria para rotar NED al marco secundario, [x y z].

La segunda columna de la matriz de rotación corresponde al producto cruzado de la lectura del acelerómetro y la lectura del magnetómetro:
Por definición de matriz de rotación, la columna 1 es el producto cruzado de las columnas 2 y 3:
Finalmente, la matriz de rotación se normaliza en columnas:
Nota
El algoritmo ecompass utiliza el norte magnético, no el norte verdadero, para el sistema de coordenadas NED.
Referencias
[1] Open Source Sensor Fusion. https://github.com/memsindustrygroup/Open-Source-Sensor-Fusion/tree/master/docs
Capacidades ampliadas
Historial de versiones
Introducido en R2018b