kinematicTrajectory
Generador de trayectoria impulsado por tasa
Descripción
kinematicTrajectory System object™ genera trayectorias utilizando una aceleración y velocidad angular especificadas.
Para generar una trayectoria a partir de tasas:
Cree el objeto
kinematicTrajectoryy configure sus propiedades.Llame al objeto con argumentos, como si fuera una función.
Para más información sobre el funcionamiento de los System objects, consulte ¿Qué son los System Objects?
Creación
Descripción
trajectory = kinematicTrajectorytrajectory, que genera una trayectoria basada en la aceleración y la velocidad angular.
trajectory = kinematicTrajectory(Name,Value)Name en el Value especificado. Las propiedades no especificadas tienen valores predeterminados.
Ejemplo: trajectory = kinematicTrajectory('SampleRate',200,'Position',[0,1,10]) crea una trayectoria cinemática System object, trajectory, con una frecuencia de muestreo de 200 Hz y la posición inicial establecida en [0,1,10].
Propiedades
Uso
Sintaxis
Descripción
[ genera el estado de la trayectoria y luego actualiza el estado de la trayectoria en función de position,orientation,velocity,acceleration,angularVelocity] = trajectory(bodyAcceleration,bodyAngularVelocity)bodyAcceleration y bodyAngularVelocity.
Esta sintaxis solo es válida si AngularVelocitySource se establece en 'Input' y AccelerationSource se establece en 'Input'.
[ genera el estado de la trayectoria y luego actualiza el estado de la trayectoria en función de position,orientation,velocity,acceleration,angularVelocity] = trajectory(bodyAngularVelocity)bodyAngularVelocity.
Esta sintaxis solo es válida si AngularVelocitySource se establece en 'Input' y AccelerationSource se establece en 'Property'.
[ genera el estado de la trayectoria y luego actualiza el estado de la trayectoria en función de position,orientation,velocity,acceleration,angularVelocity] = trajectory(bodyAcceleration)bodyAcceleration.
Esta sintaxis solo es válida si AngularVelocitySource se establece en 'Property' y AccelerationSource se establece en 'Input'.
[ genera el estado de la trayectoria y luego lo actualiza.position,orientation,velocity,acceleration,angularVelocity] = trajectory()
Esta sintaxis solo es válida si AngularVelocitySource se establece en 'Property' y AccelerationSource se establece en 'Property'.
Argumentos de entrada
Argumentos de salida
Funciones del objeto
Ejemplos
Cree un kinematicTrajectory System object ™ predeterminado y explore la relación entre la entrada, las propiedades y las trayectorias generadas.
trajectory = kinematicTrajectory
trajectory =
kinematicTrajectory with properties:
SampleRate: 100
Position: [0 0 0]
Orientation: [1×1 quaternion]
Velocity: [0 0 0]
AccelerationSource: 'Input'
AngularVelocitySource: 'Input'
De forma predeterminada, el objeto kinematicTrajectory tiene una posición inicial de [0 0 0] y una velocidad inicial de [0 0 0]. La orientación se describe mediante un cuaternión (1 + 0i + 0j + 0k).
El objeto kinematicTrajectory mantiene un estado visible y escribible en las propiedades Position, Velocity y Orientation. Cuando llama al objeto, se genera el estado y luego se actualiza.
Por ejemplo, llame al objeto especificando una aceleración y una velocidad angular relativas al sistema de coordenadas del cuerpo.
bodyAcceleration = [5,5,0]; bodyAngularVelocity = [0,0,1]; [position,orientation,velocity,acceleration,angularVelocity] = trajectory(bodyAcceleration,bodyAngularVelocity)
position = 1×3
0 0 0
orientation = quaternion
1 + 0i + 0j + 0k
velocity = 1×3
0 0 0
acceleration = 1×3
5 5 0
angularVelocity = 1×3
0 0 1
La posición, orientación y velocidad de salida del objeto trajectory corresponden al estado informado por las propiedades antes de llamar al objeto. El estado trajectory se actualiza después de ser llamado y es observable desde las propiedades:
trajectory
trajectory =
kinematicTrajectory with properties:
SampleRate: 100
Position: [2.5000e-04 2.5000e-04 0]
Orientation: [1×1 quaternion]
Velocity: [0.0500 0.0500 0]
AccelerationSource: 'Input'
AngularVelocitySource: 'Input'
La salida acceleration y angularVelocity del objeto trajectory corresponden a bodyAcceleration y bodyAngularVelocity, excepto que se devuelven en el sistema de coordenadas de navegación. Utilice la salida orientation para rotar acceleration y angularVelocity al sistema de coordenadas del cuerpo y verificar que sean aproximadamente equivalentes a bodyAcceleration y bodyAngularVelocity.
rotatedAcceleration = rotatepoint(orientation,acceleration)
rotatedAcceleration = 1×3
5 5 0
rotatedAngularVelocity = rotatepoint(orientation,angularVelocity)
rotatedAngularVelocity = 1×3
0 0 1
kinematicTrajectory System object™ le permite modificar el estado de la trayectoria a través de las propiedades. Establezca la posición en [0,0,0] y luego llame al objeto con una aceleración y velocidad angular especificadas en el sistema de coordenadas del cuerpo. Para fines ilustrativos, clone el objeto trajectory antes de modificar la propiedad Position. Llame a ambos objetos y observe que las posiciones divergen.
trajectoryClone = clone(trajectory); trajectory.Position = [0,0,0]; position = trajectory(bodyAcceleration,bodyAngularVelocity)
position = 1×3
0 0 0
clonePosition = trajectoryClone(bodyAcceleration,bodyAngularVelocity)
clonePosition = 1×3
10-3 ×
0.2500 0.2500 0
Este ejemplo muestra cómo crear una trayectoria que oscila a lo largo del eje Norte de un sistema de coordenadas NED local utilizando kinematicTrajectory System object ™.
Crea un objeto kinematicTrajectory predeterminado. La orientación inicial predeterminada está alineada con el sistema de coordenadas NED local.
traj = kinematicTrajectory
traj =
kinematicTrajectory with properties:
SampleRate: 100
Position: [0 0 0]
Orientation: [1×1 quaternion]
Velocity: [0 0 0]
AccelerationSource: 'Input'
AngularVelocitySource: 'Input'
Defina una trayectoria con una duración de 10 segundos que consista en una rotación alrededor del eje este (paso) y una oscilación a lo largo del eje norte del sistema de coordenadas NED local. Utilice la frecuencia de muestreo predeterminada kinematicTrajectory.
fs = traj.SampleRate;
duration = 10;
numSamples = duration*fs;
cyclesPerSecond = 1;
samplesPerCycle = fs/cyclesPerSecond;
numCycles = ceil(numSamples/samplesPerCycle);
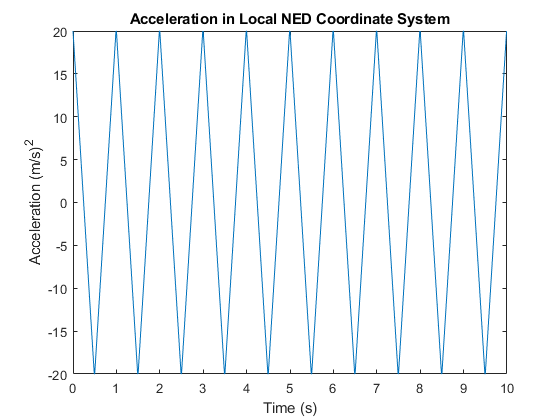
maxAccel = 20;
triangle = [linspace(maxAccel,1/fs-maxAccel,samplesPerCycle/2), ...
linspace(-maxAccel,maxAccel-(1/fs),samplesPerCycle/2)]';
oscillation = repmat(triangle,numCycles,1);
oscillation = oscillation(1:numSamples);
accNED = [zeros(numSamples,2),oscillation];
angVelNED = zeros(numSamples,3);
angVelNED(:,2) = 2*pi;
Trazar la señal de control de aceleración.
timeVector = 0:1/fs:(duration-1/fs); figure(1) plot(timeVector,oscillation) xlabel('Time (s)') ylabel('Acceleration (m/s)^2') title('Acceleration in Local NED Coordinate System')
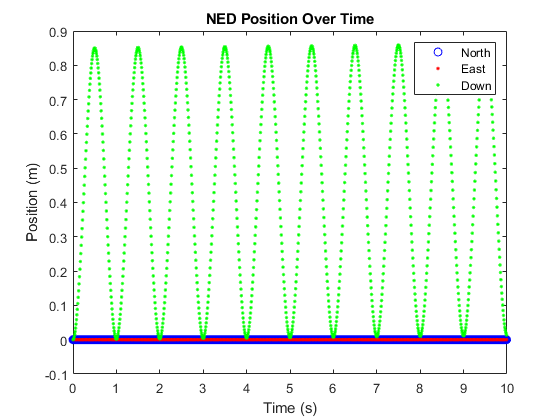
Genere la trayectoria muestra por muestra en un bucle. kinematicTrajectory System object asume que las entradas de aceleración y velocidad angular están en el sistema de coordenadas del cuerpo del sensor local. Gire las señales de control de aceleración y velocidad angular desde el sistema de coordenadas NED al sistema de coordenadas del cuerpo del sensor utilizando rotateframe y el estado Orientation. Actualiza un gráfico tridimensional de la posición en cada momento. Agregue pause para imitar el procesamiento en tiempo real. Una vez que se completa el ciclo, traza la posición a lo largo del tiempo. Al girar las señales de control accNED y angVelNED al sistema de coordenadas del cuerpo local se garantiza que el movimiento se mantenga a lo largo del eje descendente.
figure(2) plotHandle = plot3(traj.Position(1),traj.Position(2),traj.Position(3),'bo'); grid on xlabel('North') ylabel('East') zlabel('Down') axis([-1 1 -1 1 0 1.5]) hold on q = ones(numSamples,1,'quaternion'); for ii = 1:numSamples accBody = rotateframe(traj.Orientation,accNED(ii,:)); angVelBody = rotateframe(traj.Orientation,angVelNED(ii,:)); [pos(ii,:),q(ii),vel,ac] = traj(accBody,angVelBody); set(plotHandle,'XData',pos(ii,1),'YData',pos(ii,2),'ZData',pos(ii,3)) pause(1/fs) end figure(3) plot(timeVector,pos(:,1),'bo',... timeVector,pos(:,2),'r.',... timeVector,pos(:,3),'g.') xlabel('Time (s)') ylabel('Position (m)') title('NED Position Over Time') legend('North','East','Down')

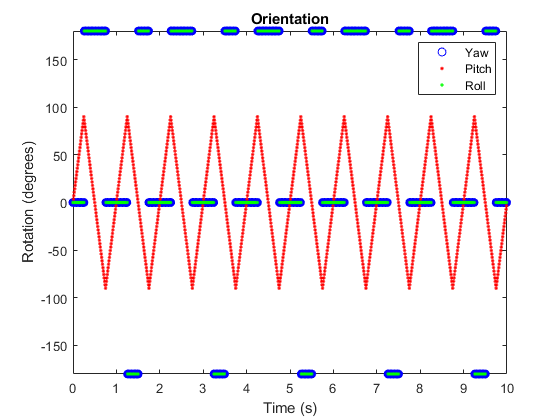
Convierta la orientación registrada a ángulos de Euler y grafique. Aunque la orientación de la plataforma cambió con el tiempo, la aceleración siempre actuó a lo largo del eje Norte.
figure(4) eulerAngles = eulerd(q,'ZYX','frame'); plot(timeVector,eulerAngles(:,1),'bo',... timeVector,eulerAngles(:,2),'r.',... timeVector,eulerAngles(:,3),'g.') axis([0,duration,-180,180]) legend('Yaw','Pitch','Roll') xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation')
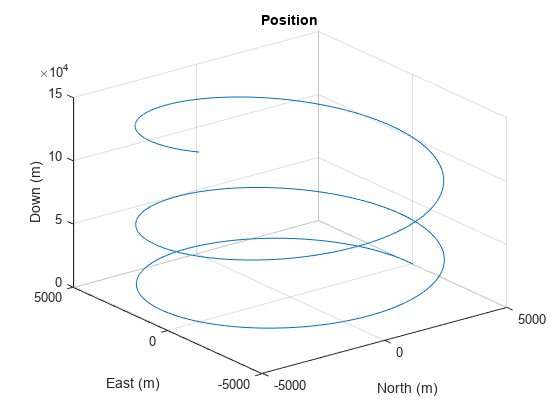
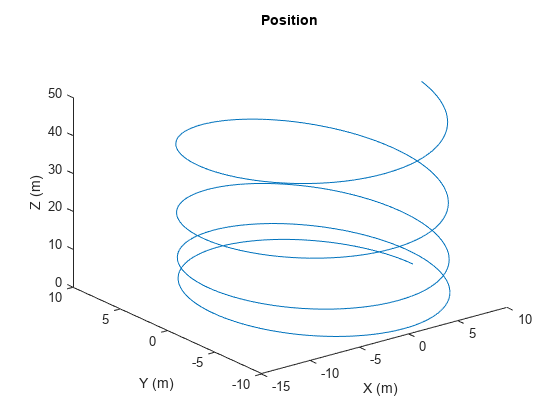
Este ejemplo muestra cómo generar una trayectoria de bobina utilizando kinematicTrajectory System object ™.
Cree una trayectoria circular con una duración de 1000 segundos y una frecuencia de muestreo de 10 Hz. Establezca el radio del círculo en 5000 metros y la velocidad en 80 metros por segundo. Establezca la velocidad de ascenso en 100 metros por segundo y la inclinación en 15 grados. Especifique la orientación inicial apuntando en la dirección del movimiento.
duration = 1000; % seconds fs = 10; % Hz N = duration*fs; % number of samples radius = 5000; % meters speed = 80; % meters per second climbRate = 50; % meters per second initialYaw = 90; % degrees pitch = 15; % degrees initPos = [radius, 0, 0]; initVel = [0, speed, climbRate]; initOrientation = quaternion([initialYaw,pitch,0],'eulerd','zyx','frame'); trajectory = kinematicTrajectory('SampleRate',fs, ... 'Velocity',initVel, ... 'Position',initPos, ... 'Orientation',initOrientation);
Especifique una aceleración y una velocidad angular constantes en el sistema de coordenadas del cuerpo. Gire la estructura del cuerpo para tener en cuenta el tono.
accBody = zeros(N,3); accBody(:,2) = speed^2/radius; accBody(:,3) = 0.2; angVelBody = zeros(N,3); angVelBody(:,3) = speed/radius; pitchRotation = quaternion([0,pitch,0],'eulerd','zyx','frame'); angVelBody = rotateframe(pitchRotation,angVelBody); accBody = rotateframe(pitchRotation,accBody);
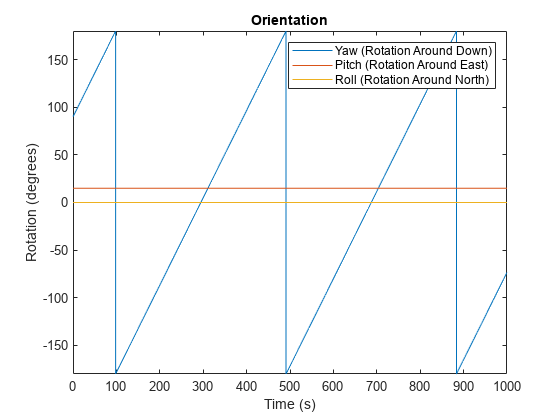
Llame a trajectory con la aceleración y velocidad angular especificadas en el sistema de coordenadas del cuerpo. Trazar la posición, orientación y velocidad en el tiempo.
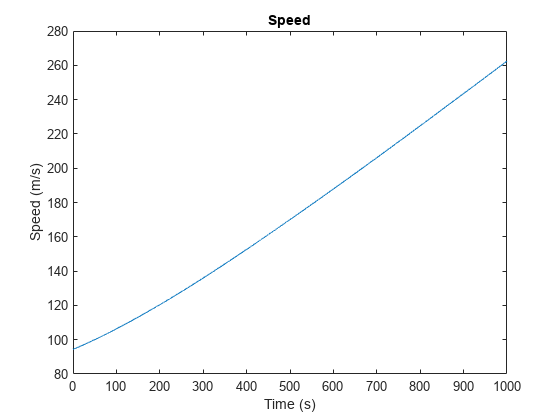
[position, orientation, velocity] = trajectory(accBody,angVelBody); eulerAngles = eulerd(orientation,'ZYX','frame'); speed = sqrt(sum(velocity.^2,2)); timeVector = (0:(N-1))/fs; figure(1) plot3(position(:,1),position(:,2),position(:,3)) xlabel('North (m)') ylabel('East (m)') zlabel('Down (m)') title('Position') grid on
figure(2) plot(timeVector,eulerAngles(:,1),... timeVector,eulerAngles(:,2),... timeVector,eulerAngles(:,3)) axis([0,duration,-180,180]) legend('Yaw (Rotation Around Down)','Pitch (Rotation Around East)','Roll (Rotation Around North)') xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation')
figure(3) plot(timeVector,speed) xlabel('Time (s)') ylabel('Speed (m/s)') title('Speed')
Defina una velocidad angular constante y una aceleración constante que describan una trayectoria circular en espiral.
Fs = 100; r = 10; speed = 2.5; initialYaw = 90; initPos = [r 0 0]; initVel = [0 speed 0]; initOrient = quaternion([initialYaw 0 0], 'eulerd', 'ZYX', 'frame'); accBody = [0 speed^2/r 0.01]; angVelBody = [0 0 speed/r];
Crea un objeto de trayectoria cinemática.
traj = kinematicTrajectory('SampleRate',Fs, ... 'Position',initPos, ... 'Velocity',initVel, ... 'Orientation',initOrient, ... 'AccelerationSource','Property', ... 'Acceleration',accBody, ... 'AngularVelocitySource','Property', ... 'AngularVelocity',angVelBody);
Llame al objeto de trayectoria cinemática en un bucle y registre la salida de posición. Trazar la posición a lo largo del tiempo.
N = 10000; pos = zeros(N, 3); for i = 1:N pos(i,:) = traj(); end plot3(pos(:,1), pos(:,2), pos(:,3)) title('Position') xlabel('X (m)') ylabel('Y (m)') zlabel('Z (m)')
Capacidades ampliadas
Historial de versiones
Introducido en R2019b