waypointTrajectory
Generador de trayectoria de waypoint
Descripción
waypointTrajectory System object™ genera trayectorias basadas en puntos de referencia específicos. Al crear el System object, puede elegir especificar el tiempo de llegada, la velocidad o la velocidad respecto al suelo en cada punto de referencia. Opcionalmente, puede especificar otras propiedades, como la orientación en cada punto de referencia. Consulte Algoritmos para obtener más detalles.
Para generar una trayectoria a partir de waypoints:
Cree el objeto
waypointTrajectoryy configure sus propiedades.Llame al objeto como si fuera una función.
Para obtener más información sobre cómo funcionan los objetos del sistema, consulte ¿Qué son los objetos del sistema?.
Creación
Sintaxis
Descripción
trajectory = waypointTrajectorytrajectory, que genera una trayectoria basada en puntos de referencia estacionarios predeterminados.
trajectory = waypointTrajectory(Waypoints,TimeOfArrival)TimeOfArrival para obtener más detalles.
Sugerencia
Cuando especifique el argumento TimeOfArrival, no debe especificar estas propiedades:
JerkLimitInitialTimeWaitTime
trajectory = waypointTrajectory(Waypoints,GroundSpeed=groundSpeed)GroundSpeed para obtener más detalles.
trajectory = waypointTrajectory(Waypoints,Velocities=velocities)Velocities para obtener más detalles.
trajectory = waypointTrajectory(___,Name=Value)
Ejemplo: trajectory = waypointTrajectory([10,10,0;20,20,0;20,20,10],[0,0.5,10]) crea una trayectoria de punto de referencia System object, trajectory, que comienza en el punto de referencia [10,10,0] y luego pasa por [20,20,0] después de 0,5 segundos y [20,20,10] después de 10 segundos.
Propiedades
Uso
Descripción
[ genera un marco de datos de trayectoria basado en argumentos y propiedades de creación especificados.position,orientation,velocity,acceleration,angularVelocity] = trajectory()
Argumentos de salida
Funciones del objeto
Para usar una función de objeto, especifique el System object como el primer argumento de entrada. Por ejemplo, para liberar recursos de sistema de un System object llamado obj, utilice la siguiente sintaxis:
release(obj)
Ejemplos
trajectory = waypointTrajectory
trajectory =
waypointTrajectory with properties:
SampleRate: 100
SamplesPerFrame: 1
Waypoints: [2×3 double]
TimeOfArrival: [2×1 double]
Velocities: [2×3 double]
Course: [2×1 double]
GroundSpeed: [2×1 double]
ClimbRate: [2×1 double]
Orientation: [2×1 quaternion]
AutoPitch: 0
AutoBank: 0
ReferenceFrame: 'NED'
Inspeccione los puntos de referencia predeterminados y los tiempos de llegada llamando a waypointInfo. Por defecto, los waypoints indican una posición estacionaria durante un segundo.
waypointInfo(trajectory)
ans=2×2 table
TimeOfArrival Waypoints
_____________ ___________
0 0 0 0
1 0 0 0
Cree una trayectoria cuadrada y examine la relación entre las restricciones de los puntos de referencia, la frecuencia de muestreo y la trayectoria generada.
Crea una trayectoria cuadrada definiendo los vértices del cuadrado. Defina la orientación en cada punto de referencia como apuntando en la dirección del movimiento. Especifique una frecuencia de muestreo de 1 Hz y utilice el valor predeterminado SamplesPerFrame de 1.
waypoints = [0,0,0; ... % Initial position 0,1,0; ... 1,1,0; ... 1,0,0; ... 0,0,0]; % Final position toa = 0:4; % time of arrival orientation = quaternion([0,0,0; ... 45,0,0; ... 135,0,0; ... 225,0,0; ... 0,0,0], ... "eulerd","ZYX","frame"); trajectory = waypointTrajectory(waypoints, ... TimeOfArrival=toa, ... Orientation=orientation, ... SampleRate=1);
Crea una figura y traza la posición inicial de la plataforma.
figure(1) plot(waypoints(1,1),waypoints(1,2),"b*") axis([-1,2,-1,2]) axis square xlabel("X") ylabel("Y") title("Position") grid on hold on
En un bucle, recorra la trayectoria para generar la posición actual y la orientación actual. Trace la posición actual y registre la orientación. Utilice pause para imitar el procesamiento en tiempo real.
orientationLog = zeros(toa(end)*trajectory.SampleRate,1,"quaternion"); count = 1; while ~isDone(trajectory) [currentPosition,orientationLog(count)] = trajectory(); plot(currentPosition(1),currentPosition(2),"bo") pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count + 1; end hold off

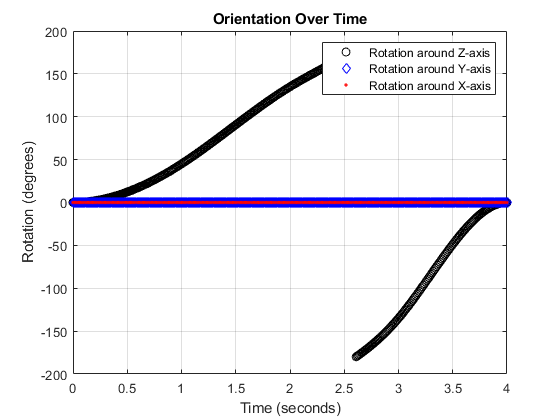
Convierta los cuaterniones de orientación a ángulos de Euler para facilitar la interpretación y luego trace la orientación en el tiempo.
figure(2) eulerAngles = eulerd([orientation(1);orientationLog],"ZYX","frame"); plot(toa,eulerAngles(:,1),"ko", ... toa,eulerAngles(:,2),"bd", ... toa,eulerAngles(:,3),"r."); title("Orientation Over Time") legend("Rotation around Z-axis","Rotation around Y-axis","Rotation around X-axis") xlabel("Time (seconds)") ylabel("Rotation (degrees)") grid on

Hasta ahora, el objeto de trayectoria solo ha generado los waypoints que se especificaron durante la construcción. Para interpolar entre puntos de referencia, aumente la frecuencia de muestreo a una velocidad más rápida que el tiempo de llegada de los puntos de referencia. Establezca la frecuencia de muestreo trajectory en 100 Hz y llame a reset.
trajectory.SampleRate = 100; reset(trajectory)
Crea una figura y traza la posición inicial de la plataforma. En un bucle, recorra la trayectoria para generar la posición actual y la orientación actual. Trace la posición actual y registre la orientación. Utilice pause para imitar el procesamiento en tiempo real.
figure(1) plot(waypoints(1,1),waypoints(1,2),"b*") title("Position") axis([-1,2,-1,2]) axis square xlabel("X") ylabel("Y") grid on hold on orientationLog = zeros(toa(end)*trajectory.SampleRate,1,"quaternion"); count = 1; while ~isDone(trajectory) [currentPosition,orientationLog(count)] = trajectory(); plot(currentPosition(1),currentPosition(2),"bo") pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count + 1; end hold off

La salida de la trayectoria ahora parece circular. Esto se debe a que waypointTrajectory System object™ minimiza la aceleración y la velocidad angular al interpolar, lo que da como resultado movimientos más suaves y realistas en la mayoría de los escenarios.
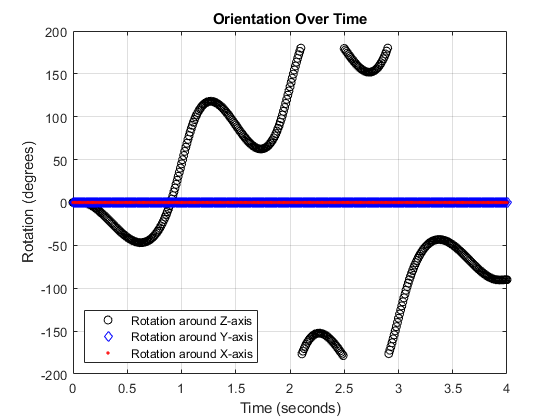
Convierta los cuaterniones de orientación a ángulos de Euler para facilitar la interpretación y luego trace la orientación en el tiempo. La orientación también se interpola.
figure(2) eulerAngles = eulerd([orientation(1);orientationLog],"ZYX","frame"); t = 0:1/trajectory.SampleRate:4; plot(t,eulerAngles(:,1),"ko", ... t,eulerAngles(:,2),"bd", ... t,eulerAngles(:,3),"r."); title("Orientation Over Time") legend("Rotation around Z-axis","Rotation around Y-axis","Rotation around X-axis") xlabel("Time (seconds)") ylabel("Rotation (degrees)") grid on
El algoritmo waypointTrajectory interpola los puntos de referencia para crear una trayectoria suave. Para volver a la trayectoria cuadrada, proporcione más puntos de referencia, especialmente alrededor de cambios bruscos. Para realizar un seguimiento de los tiempos, puntos de referencia y orientación correspondientes, especifique toda la información de la trayectoria en una única matriz.
% Time, Waypoint, Orientation trajectoryInfo = [0, 0,0,0, 0,0,0; ... % Initial position 0.1, 0,0.1,0, 0,0,0; ... 0.9, 0,0.9,0, 0,0,0; ... 1, 0,1,0, 45,0,0; ... 1.1, 0.1,1,0, 90,0,0; ... 1.9, 0.9,1,0, 90,0,0; ... 2, 1,1,0, 135,0,0; ... 2.1, 1,0.9,0, 180,0,0; ... 2.9, 1,0.1,0, 180,0,0; ... 3, 1,0,0, 225,0,0; ... 3.1, 0.9,0,0, 270,0,0; ... 3.9, 0.1,0,0, 270,0,0; ... 4, 0,0,0, 270,0,0]; % Final position trajectory = waypointTrajectory(trajectoryInfo(:,2:4), ... TimeOfArrival=trajectoryInfo(:,1), ... Orientation=quaternion(trajectoryInfo(:,5:end),"eulerd","ZYX","frame"), ... SampleRate=100);
Crea una figura y traza la posición inicial de la plataforma. En un bucle, recorra la trayectoria para generar la posición actual y la orientación actual. Trace la posición actual y registre la orientación. Utilice pause para imitar el procesamiento en tiempo real.
figure(1) plot(waypoints(1,1),waypoints(1,2),"b*") title("Position") axis([-1,2,-1,2]) axis square xlabel("X") ylabel("Y") grid on hold on orientationLog = zeros(toa(end)*trajectory.SampleRate,1,"quaternion"); count = 1; while ~isDone(trajectory) [currentPosition,orientationLog(count)] = trajectory(); plot(currentPosition(1),currentPosition(2),"bo") pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count+1; end hold off

La salida de la trayectoria ahora parece más cuadrada, especialmente alrededor de los vértices con puntos de referencia.
Convierta los cuaterniones de orientación a ángulos de Euler para facilitar la interpretación y luego trace la orientación en el tiempo.
figure(2) eulerAngles = eulerd([orientation(1);orientationLog],"ZYX","frame"); t = 0:1/trajectory.SampleRate:4; eulerAngles = plot(t,eulerAngles(:,1),"ko", ... t,eulerAngles(:,2),"bd", ... t,eulerAngles(:,3),"r."); title("Orientation Over Time") legend("Rotation around Z-axis", ... "Rotation around Y-axis", ... "Rotation around X-axis", ... "Location", "SouthWest") xlabel("Time (seconds)") ylabel("Rotation (degrees)") grid on
Este ejemplo muestra cómo crear una trayectoria de arco utilizando waypointTrajectory System object ™. waypointTrajectory crea una ruta a través de puntos de referencia específicos que minimiza la aceleración y la velocidad angular. Después de crear una trayectoria de arco, restringe la trayectoria para que esté dentro de límites preestablecidos.
Crear una trayectoria de arco
Defina una matriz de restricciones que consta de puntos de referencia, tiempos de llegada y orientación para una trayectoria de arco. La trayectoria generada pasa por los puntos de referencia en los momentos especificados con la orientación especificada. waypointTrajectory System object requiere que la orientación se especifique utilizando cuaterniones o matrices de rotación. Convierte los ángulos de Euler guardados en la matriz de restricciones en cuaterniones al especificar la propiedad Orientation.
% Arrival, Waypoints, Orientation constraints = [0, 20,20,0, 90,0,0; 3, 50,20,0, 90,0,0; 4, 58,15.5,0, 162,0,0; 5.5, 59.5,0,0 180,0,0]; trajectory = waypointTrajectory(constraints(:,2:4), ... TimeOfArrival=constraints(:,1), ... Orientation=quaternion(constraints(:,5:7),"eulerd","ZYX","frame"));
Llame a waypointInfo en trajectory para devolver una tabla de las restricciones especificadas. Las propiedades de creación Waypoints, TimeOfArrival y Orientation son variables de la tabla. La tabla es conveniente para indexar mientras se traza.
tInfo = waypointInfo(trajectory)
tInfo=4×3 table
TimeOfArrival Waypoints Orientation
_____________ ____________________ ________________
0 20 20 0 {1×1 quaternion}
3 50 20 0 {1×1 quaternion}
4 58 15.5 0 {1×1 quaternion}
5.5 59.5 0 0 {1×1 quaternion}
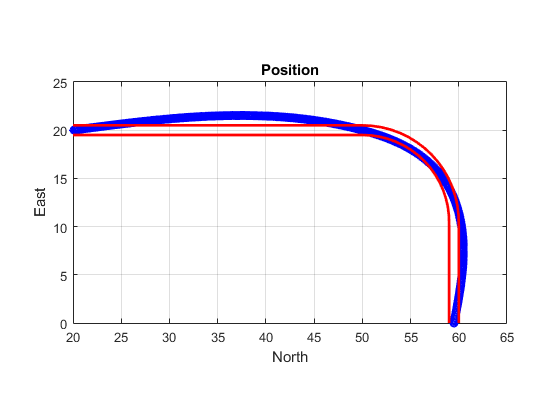
El objeto de trayectoria genera la posición actual, la velocidad, la aceleración y la velocidad angular en cada llamada. Llama a trajectory en un bucle y traza la posición a lo largo del tiempo. Almacene en caché las otras salidas.
figure(1) plot(tInfo.Waypoints(1,1),tInfo.Waypoints(1,2),"b*") title("Position") axis([20,65,0,25]) xlabel("North") ylabel("East") grid on daspect([1 1 1]) hold on orient = zeros(tInfo.TimeOfArrival(end)*trajectory.SampleRate,1,"quaternion"); vel = zeros(tInfo.TimeOfArrival(end)*trajectory.SampleRate,3); acc = vel; angVel = vel; count = 1; while ~isDone(trajectory) [pos,orient(count),vel(count,:),acc(count,:),angVel(count,:)] = trajectory(); plot(pos(1),pos(2),"bo") pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count + 1; end

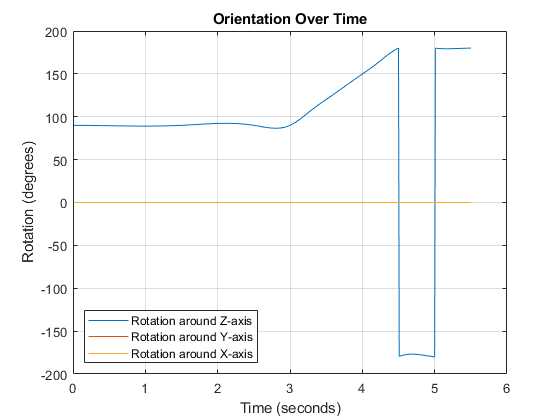
Inspeccione la orientación, velocidad, aceleración y velocidad angular a lo largo del tiempo. waypointTrajectory System object™ crea una ruta a través de las restricciones especificadas que minimizan la aceleración y la velocidad angular.
figure(2)
timeVector = 0:(1/trajectory.SampleRate):tInfo.TimeOfArrival(end);
eulerAngles = eulerd([tInfo.Orientation{1};orient],"ZYX","frame");
plot(timeVector,eulerAngles(:,1), ...
timeVector,eulerAngles(:,2), ...
timeVector,eulerAngles(:,3));
title("Orientation Over Time")
legend("Rotation around Z-axis", ...
"Rotation around Y-axis", ...
"Rotation around X-axis", ...
"Location","southwest")
xlabel("Time (seconds)")
ylabel("Rotation (degrees)")
grid on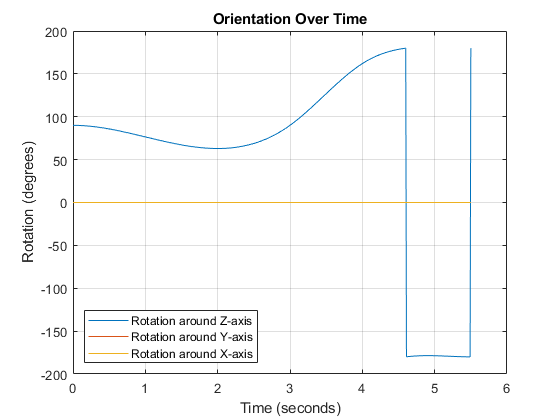
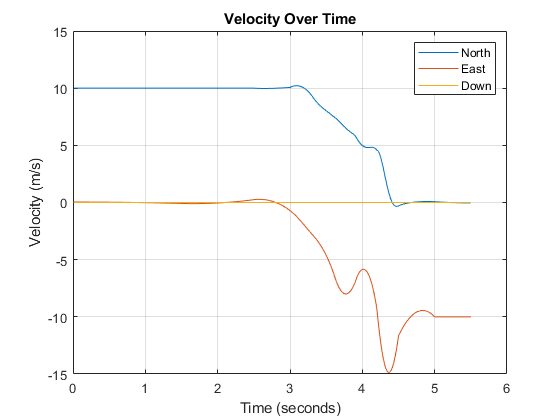
figure(3) plot(timeVector(2:end),vel(:,1), ... timeVector(2:end),vel(:,2), ... timeVector(2:end),vel(:,3)); title("Velocity Over Time") legend("North","East","Down") xlabel("Time (seconds)") ylabel("Velocity (m/s)") grid on

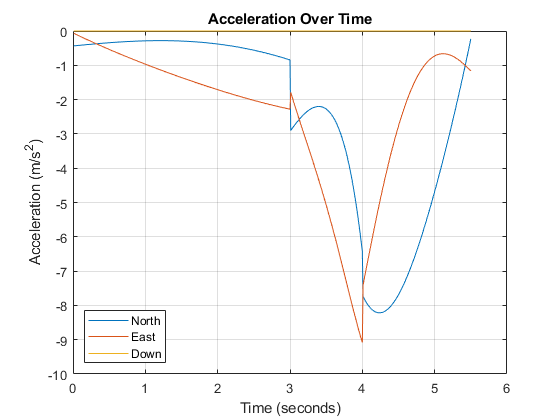
figure(4) plot(timeVector(2:end),acc(:,1), ... timeVector(2:end),acc(:,2), ... timeVector(2:end),acc(:,3)); title("Acceleration Over Time") legend("North","East","Down","Location","southwest") xlabel("Time (seconds)") ylabel("Acceleration (m/s^2)") grid on
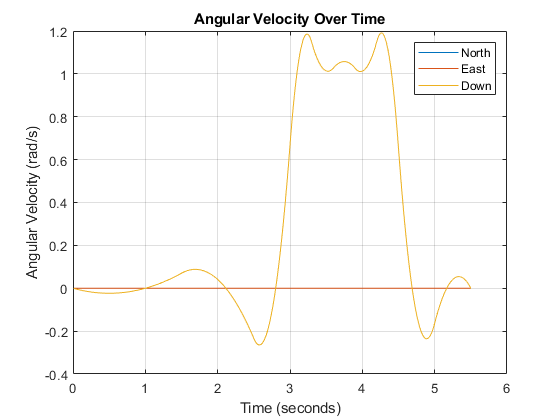
figure(5) plot(timeVector(2:end),angVel(:,1), ... timeVector(2:end),angVel(:,2), ... timeVector(2:end),angVel(:,3)); title("Angular Velocity Over Time") legend("North","East","Down") xlabel("Time (seconds)") ylabel("Angular Velocity (rad/s)") grid on
Restringir la trayectoria del arco dentro de límites preestablecidos
Puede especificar puntos de referencia adicionales para crear trayectorias dentro de límites determinados. Cree límites superior e inferior para la trayectoria del arco.
figure(1) xUpperBound = [(20:50)';50+10*sin(0:0.1:pi/2)';60*ones(11,1)]; yUpperBound = [20.5.*ones(31,1);10.5+10*cos(0:0.1:pi/2)';(10:-1:0)']; xLowerBound = [(20:49)';50+9*sin(0:0.1:pi/2)';59*ones(11,1)]; yLowerBound = [19.5.*ones(30,1);10.5+9*cos(0:0.1:pi/2)';(10:-1:0)']; plot(xUpperBound,yUpperBound,"r","LineWidth",2); plot(xLowerBound,yLowerBound,"r","LineWidth",2)
Para crear una trayectoria dentro de los límites, agregue puntos de referencia adicionales. Crea un nuevo waypointTrajectory System object ™ y luego llámalo en un bucle para trazar la trayectoria generada. Almacene en caché la salida de orientación, velocidad, aceleración y velocidad angular del objeto trajectory.
% Time, Waypoint, Orientation constraints = [0, 20,20,0, 90,0,0; 1.5, 35,20,0, 90,0,0; 2.5 45,20,0, 90,0,0; 3, 50,20,0, 90,0,0; 3.3, 53,19.5,0, 108,0,0; 3.6, 55.5,18.25,0, 126,0,0; 3.9, 57.5,16,0, 144,0,0; 4.2, 59,14,0, 162,0,0; 4.5, 59.5,10,0 180,0,0; 5, 59.5,5,0 180,0,0; 5.5, 59.5,0,0 180,0,0]; trajectory = waypointTrajectory(constraints(:,2:4), ... TimeOfArrival=constraints(:,1), ... Orientation=quaternion(constraints(:,5:7),"eulerd","ZYX","frame")); tInfo = waypointInfo(trajectory); figure(1) plot(tInfo.Waypoints(1,1),tInfo.Waypoints(1,2),"b*") count = 1; while ~isDone(trajectory) [pos,orient(count),vel(count,:),acc(count,:),angVel(count,:)] = trajectory(); plot(pos(1),pos(2),"gd") pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count + 1; end
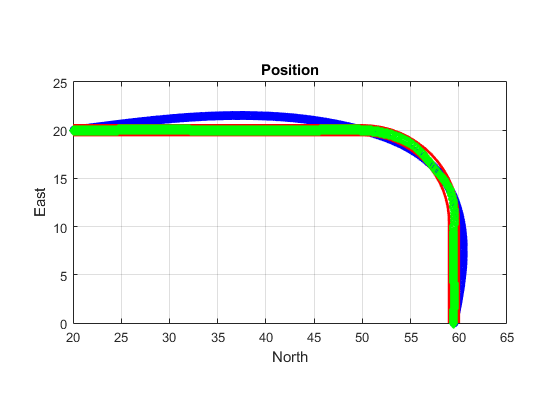
La trayectoria generada ahora encaja dentro de los límites especificados. Visualice la orientación, velocidad, aceleración y velocidad angular de la trayectoria generada.
figure(2) timeVector = 0:(1/trajectory.SampleRate):tInfo.TimeOfArrival(end); eulerAngles = eulerd(orient,"ZYX","frame"); plot(timeVector(2:end),eulerAngles(:,1), ... timeVector(2:end),eulerAngles(:,2), ... timeVector(2:end),eulerAngles(:,3)); title("Orientation Over Time") legend("Rotation around Z-axis", ... "Rotation around Y-axis", ... "Rotation around X-axis", ... "Location","southwest") xlabel("Time (seconds)") ylabel("Rotation (degrees)") grid on
figure(3) plot(timeVector(2:end),vel(:,1), ... timeVector(2:end),vel(:,2), ... timeVector(2:end),vel(:,3)); title("Velocity Over Time") legend("North","East","Down") xlabel("Time (seconds)") ylabel("Velocity (m/s)") grid on
figure(4) plot(timeVector(2:end),acc(:,1), ... timeVector(2:end),acc(:,2), ... timeVector(2:end),acc(:,3)); title("Acceleration Over Time") legend("North","East","Down") xlabel("Time (seconds)") ylabel("Acceleration (m/s^2)") grid on

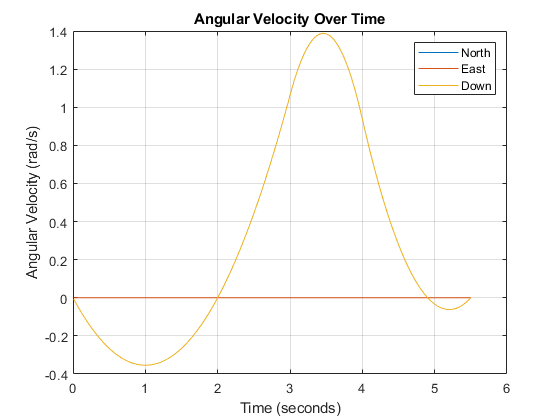
figure(5) plot(timeVector(2:end),angVel(:,1), ... timeVector(2:end),angVel(:,2), ... timeVector(2:end),angVel(:,3)); title("Angular Velocity Over Time") legend("North","East","Down") xlabel("Time (seconds)") ylabel("Angular Velocity (rad/s)") grid on
Tenga en cuenta que, si bien la trayectoria generada ahora se ajusta dentro de los límites espaciales, la aceleración y la velocidad angular de la trayectoria son más erráticas porque los puntos de referencia están demasiado especificados.
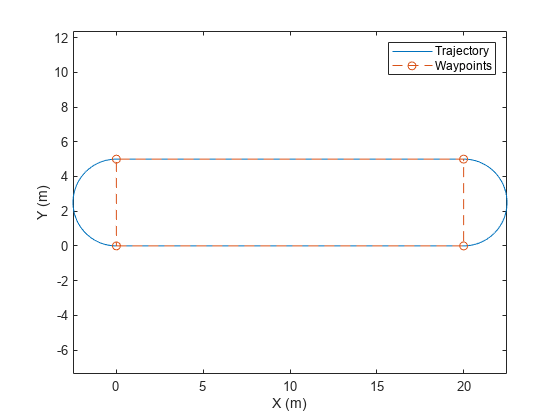
Considere una trayectoria en una pista de carreras como la siguiente.
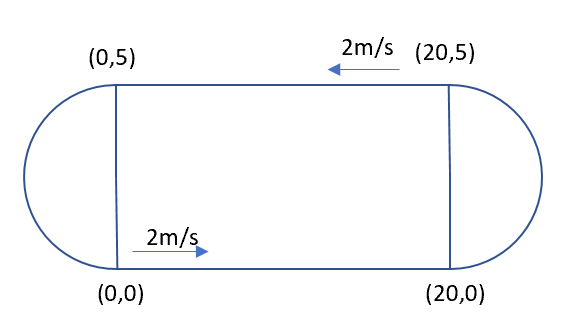
Los cuatro puntos de las esquinas de la trayectoria son (0,0,0), (20,0,0), (20,5,0) y (0,5,0) en metros, respectivamente. Por lo tanto, especifique los puntos de referencia de un bucle como:
wps = [0 0 0;
20 0 0;
20 5 0;
0 5 0;
0 0 0];Supongamos que la trayectoria tiene una velocidad constante de 2 m/s y, por tanto, las velocidades en los cinco puntos de referencia son:
vels = [2 0 0;
2 0 0;
-2 0 0;
-2 0 0;
2 0 0];La hora de llegada a los cinco waypoints es:
t = cumsum([0 20/2 5*pi/2/2 20/2 5*pi/2/2]');
La orientación de la trayectoria en los cinco puntos de referencia son:
eulerAngs = [0 0 0;
0 0 0;
180 0 0;
180 0 0;
0 0 0]; % Angles in degrees.
% Convert Euler angles to quaternions.
quats = quaternion(eulerAngs,"eulerd","ZYX","frame");Especifique la frecuencia de muestreo como 100 para suavizar las líneas de trayectoria.
fs = 100;
Construye el waypointTrajectory.
traj = waypointTrajectory(wps,SampleRate=fs, ... Velocities=vels,... TimeOfArrival=t,... Orientation=quats);
Muestra y traza la trayectoria.
[pos, orient, vel, acc, angvel] = traj(); i = 1; spf = traj.SamplesPerFrame; while ~isDone(traj) idx = (i+1):(i+spf); [pos(idx,:), orient(idx,:), ... vel(idx,:), acc(idx,:), angvel(idx,:)] = traj(); i = i+spf; end
Traza la trayectoria y los puntos de referencia especificados.
plot(pos(:,1),pos(:,2), wps(:,1),wps(:,2), "--o") xlabel("X (m)") ylabel("Y (m)") zlabel("Z (m)") legend({"Trajectory", "Waypoints"}) axis equal
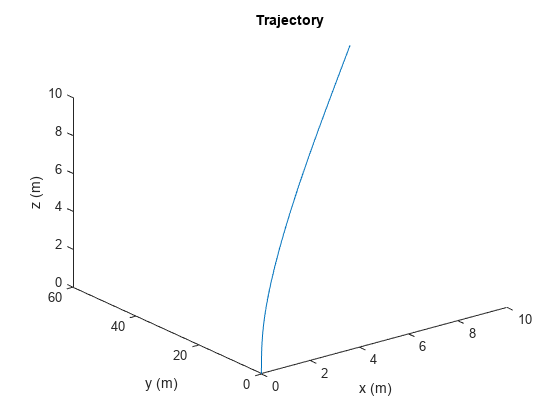
Crea un objeto waypointTrajectory que conecta dos puntos de referencia. La velocidad de la trayectoria en los dos puntos de referencia es 0 y 10 , respectivamente. Restrinja el límite de sacudida a 0,5 para habilitar el perfil de aceleración trapezoidal.
waypoints = [0 0 0;
10 50 10];
speeds = [0 10];
jerkLimit = 0.5;
trajectory = waypointTrajectory(waypoints,GroundSpeed=speeds,JerkLimit=jerkLimit);Obtenga el tiempo inicial y el tiempo final de la trayectoria consultando la propiedad TimeOfArrival. Cree marcas de tiempo para muestrear la trayectoria.
t0 = trajectory.TimeOfArrival(1); tf = trajectory.TimeOfArrival(end); sampleTimes = linspace(t0,tf,100);
Obtenga la información de posición, velocidad y aceleración en estas marcas de tiempo muestreadas utilizando la función de objeto lookupPose.
[position,~,velocity,acceleration,~] = lookupPose(trajectory,sampleTimes);
Trazar la trayectoria.
figure() plot3(position(:,1),position(:,2),position(:,3)) xlabel("x (m)") ylabel("y (m)") zlabel("z (m)") title("Trajectory")
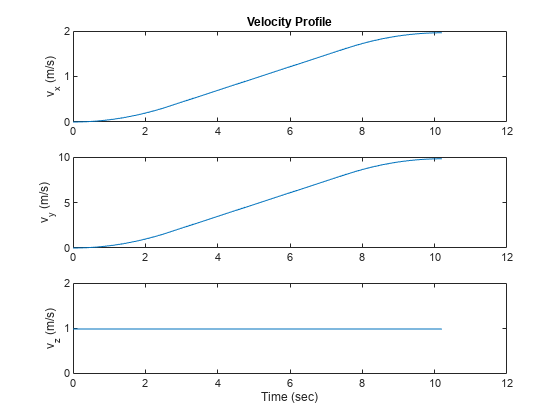
Trazar el perfil de velocidad.
figure() subplot(3,1,1) plot(sampleTimes,velocity(:,1)); ylabel("v_x (m/s)") title("Velocity Profile") subplot(3,1,2) plot(sampleTimes,velocity(:,2)); ylabel("v_y (m/s)") subplot(3,1,3) plot(sampleTimes,velocity(:,3)); ylabel("v_z (m/s)") xlabel("Time (sec)")
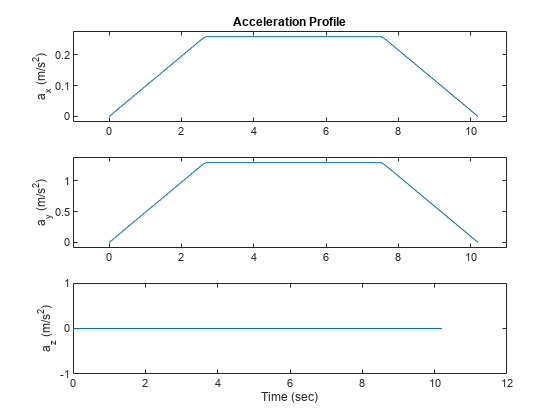
Trazar el perfil de aceleración. De los resultados se desprende que el perfil de aceleración del movimiento plano es trapezoidal.
figure() subplot(3,1,1) plot(sampleTimes,acceleration(:,1)); axis padded ylabel("a_x (m/s^2)") title("Acceleration Profile") subplot(3,1,2) plot(sampleTimes,acceleration(:,2)); ylabel("a_y (m/s^2)") axis padded subplot(3,1,3) plot(sampleTimes,acceleration(:,3)); ylabel("a_z (m/s^2)") xlabel("Time (sec)")
Algoritmos
waypointTrajectory System object define una trayectoria que pasa suavemente por puntos de referencia. La trayectoria conecta los puntos de referencia a través de una interpolación que asume que la dirección de la gravedad expresada en el marco de referencia de la trayectoria es constante. Generalmente, puedes usar waypointTrajectory para modelar trayectorias de plataformas o vehículos dentro de un lapso de distancia de cientos de kilómetros.
La trayectoria plana (proyección del plano x-y) consta de curvas clotoides fragmentadas. La curvatura de la curva entre dos puntos de referencia consecutivos varía linealmente con la longitud de la curva entre ellos. La dirección tangente de la ruta en cada punto de referencia se elige para minimizar las discontinuidades en la curvatura, a menos que el curso se especifique explícitamente a través de la propiedad Course o implícitamente a través de la propiedad Velocities. Una vez establecido la ruta, el objeto utiliza la interpolación cúbica de Hermite para calcular la ubicación del vehículo a lo largo de la ruta en función del tiempo y la distancia plana recorrida. Si se especifica la propiedad JerkLimit, los objetos producen un perfil de aceleración trapezoidal horizontal para cualquier segmento que se encuentre entre dos puntos de referencia. El perfil de aceleración trapezoidal consta de tres subsegmentos:
Un subsegmento de sacudida de magnitud constante
Un subsegmento de aceleración de magnitud constante
Un subsegmento de sacudida de magnitud constante
El componente normal (componente z) de la trayectoria se elige posteriormente para satisfacer un spline por partes que preserva la forma (PCHIP), a menos que la velocidad de ascenso se especifique explícitamente a través de la propiedad ClimbRate o la tercera columna de la propiedad Velocities. Elija el signo de la velocidad de ascenso en función del ReferenceFrame seleccionado:
Cuando se selecciona un marco de referencia 'ENU', especificar una velocidad de ascenso positiva da como resultado un valor creciente de z.
Cuando se selecciona un marco de referencia 'NED', especificar una velocidad de ascenso positiva da como resultado un valor decreciente de z.
Puede definir la orientación del vehículo a través de la ruta de dos formas principales:
Si se especifica la propiedad
Orientation, entonces el objeto utiliza un spline cuaternionario cúbico por partes para calcular la orientación a lo largo de la ruta en función del tiempo.Si no se especifica la propiedad
Orientation, la guiñada del vehículo siempre estará alineada con la trayectoria. El balanceo y el cabeceo se controlan entonces mediante los valores de propiedadAutoBankyAutoPitch, respectivamente.AutoBankAutoPitchDescripción falsefalseEl vehículo está siempre nivelado (cabeceo y balanceo cero). Esto se utiliza normalmente para embarcaciones marinas grandes. falsetrueEl paso del vehículo está alineado con la trayectoria y su balanceo es siempre cero. Normalmente se utiliza para vehículos terrestres. truefalseEl cabeceo y el balanceo del vehículo se eligen de modo que su eje local z esté alineado con la aceleración neta (incluida la gravedad). Esto se utiliza normalmente para embarcaciones de ala giratoria. truetrueEl balanceo del vehículo se elige de modo que su plano transversal local se alinee con la aceleración neta (incluida la gravedad). El paso del vehículo está alineado con la vía. Normalmente se utiliza para vehículos de dos ruedas y aviones de ala fija.