monovslam
Localización y mapeo visual simultáneo (vSLAM) y fusión de sensores visuales-inerciales con cámara monocular
Desde R2025a
Descripción
Utilice el objeto monovslam para realizar localización y mapeo visual simultáneo (vSLAM) y SLAM inercial visual (viSLAM) con una cámara monocular. El objeto extrae características Oriented FAST y Rotated BRIEF (ORB) de imágenes leídas incrementalmente y luego rastrea esas características para estimar poses de cámara, identificar fotogramas clave y reconstruir un entorno 3D. El algoritmo vSLAM también busca cierres de bucle utilizando el algoritmo de bolsa de características y luego optimiza las poses de la cámara utilizando la optimización del gráfico de poses. Puede mejorar la precisión y la robustez del SLAM integrando este objeto con datos IMU para realizar una fusión de sensores visuales-inerciales. Para obtener más información sobre SLAM visual, consulte Implement Visual SLAM in MATLAB (Computer Vision Toolbox).
Creación
Sintaxis
Descripción
vslam = monovslam(intrinsics)vslam, utilizando los parámetros intrínsecos de la cámara.
El objeto monovslam no tiene en cuenta la distorsión de la lente. Puede utilizar la función undistortImage (Computer Vision Toolbox) especificada para desdistorsionar las imágenes antes de agregarlas al objeto.
El objeto representa puntos de mapas 3D y poses de cámara en coordenadas mundiales. El objeto asume que la pose de la cámara del primer fotograma clave es una transformación de identidad rigidtform3d (Image Processing Toolbox).
Nota
El objeto monovslam se ejecuta en varios subprocesos internamente, lo que puede retrasar el procesamiento de un cuadro de imagen agregado mediante la función addFrame. Además, el objeto que se ejecuta en varios subprocesos significa que el cuadro actual que el objeto está procesando puede ser diferente del cuadro agregado recientemente.
vslam = monovslam(intrinsics,imuParameters)vslam, al fusionar las características intrínsecas de entrada de la cámara con las lecturas de la unidad de medición inercial (IMU).
vslam = monovslam(intrinsics,PropertyName=Value)MaxNumFeatures=850 establece el número máximo de puntos de características ORB para extraer de cada imagen en 850.
Argumentos de entrada
Propiedades
Funciones del objeto
addFrame | Agregar marco de imagen al objeto SLAM visual |
hasNewKeyFrame | Comprobar si se agregó un nuevo fotograma clave en el objeto SLAM visual |
checkStatus | Comprobar el estado del objeto SLAM visual |
isDone | Estado de fin de procesamiento para el objeto SLAM visual |
mapPoints | Construir un mapa 3D de puntos del mundo |
poses | Poses absolutas de cámara de fotogramas clave |
plot | Graficar puntos de mapa 3D y trayectoria estimada de la cámara en SLAM visual |
reset | Restablecer objeto SLAM visual |
Ejemplos
Realice la localización y el mapeo visual simultáneo monocular (vSLAM) utilizando los datos del TUM RGB-D Benchmark. Puede descargar los datos a un directorio temporal utilizando un navegador web o ejecutando este código:
baseDownloadURL = "https://cvg.cit.tum.de/rgbd/dataset/freiburg3/rgbd_dataset_freiburg3_long_office_household.tgz"; dataFolder = fullfile(tempdir,"tum_rgbd_dataset",filesep); options = weboptions(Timeout=Inf); tgzFileName = dataFolder+"fr3_office.tgz"; folderExists = exist(dataFolder,"dir"); % Create a folder in a temporary directory to save the downloaded file if ~folderExists mkdir(dataFolder) disp("Downloading fr3_office.tgz (1.38 GB). This download can take a few minutes.") websave(tgzFileName,baseDownloadURL,options); % Extract contents of the downloaded file disp("Extracting fr3_office.tgz (1.38 GB) ...") untar(tgzFileName,dataFolder); end
Crea un objeto imageDatastore para almacenar todas las imágenes RGB.
imageFolder = dataFolder+"rgbd_dataset_freiburg3_long_office_household/rgb/";
imds = imageDatastore(imageFolder);Especifique los parámetros intrínsecos de su cámara y utilícelos para crear un objeto SLAM visual monocular.
intrinsics = cameraIntrinsics([535.4 539.2],[320.1 247.6],[480 640]); vslam = monovslam(intrinsics,TrackFeatureRange=[30,120]);
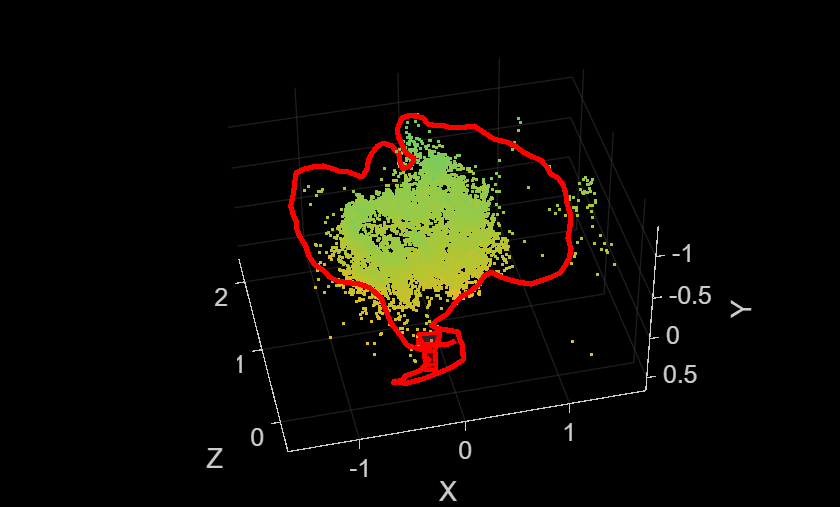
Procese cada fotograma de la imagen y visualice las poses de la cámara y los puntos del mapa 3D. Tenga en cuenta que el objeto monovslam ejecuta varias partes del algoritmo en subprocesos separados, lo que puede introducir una latencia en el procesamiento de un cuadro de imagen agregado mediante la función addFrame.
for i = 1:numel(imds.Files) addFrame(vslam,readimage(imds,i)) if hasNewKeyFrame(vslam) % Display 3-D map points and camera trajectory plot(vslam); end % Get current status of system status = checkStatus(vslam); end
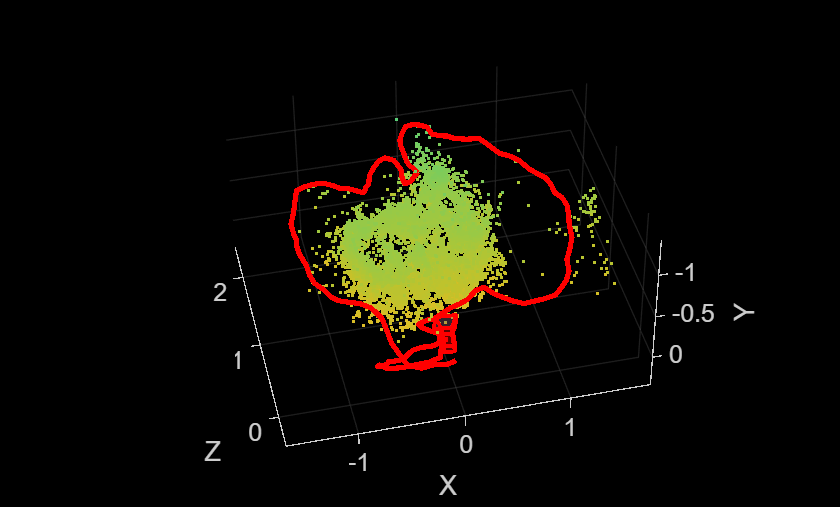
Grafique los resultados intermedios y espere hasta que se procesen todas las imágenes.
while ~isDone(vslam) if hasNewKeyFrame(vslam) plot(vslam); end end
Una vez procesadas todas las imágenes, puedes recopilar los puntos del mapa 3D finales y las poses de la cámara para un análisis posterior.
xyzPoints = mapPoints(vslam);
[camPoses,addedFramesIdx] = poses(vslam);
% Reset the system
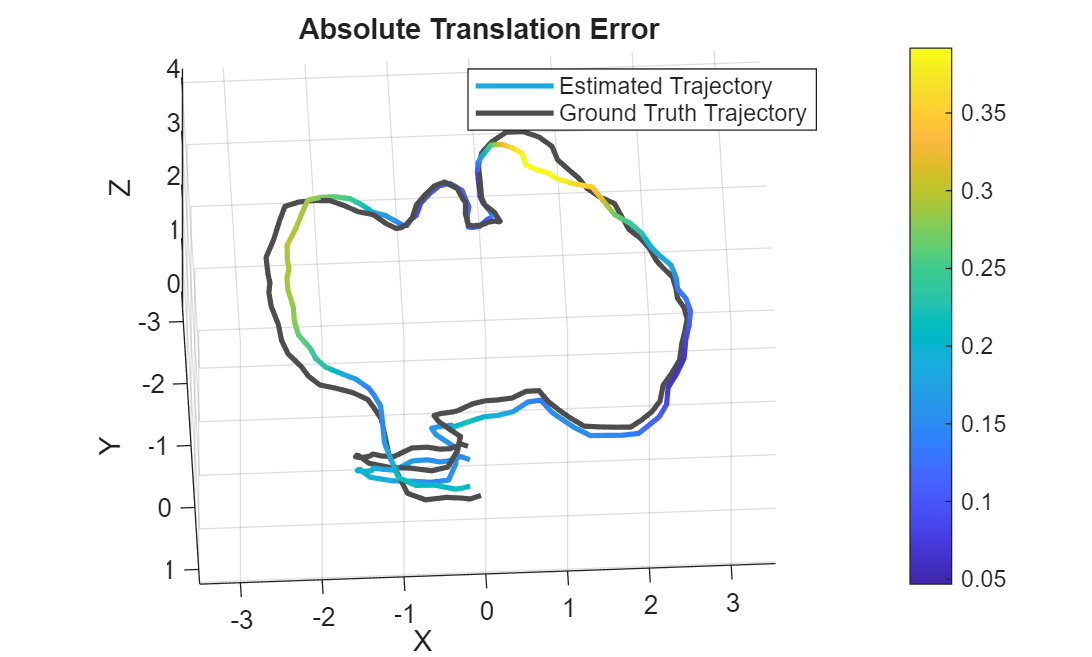
reset(vslam)Compare la trayectoria estimada de la cámara con la ground-truth para evaluar la precisión.
% Load ground truth gTruthData = load("orbslamGroundTruth.mat"); gTruth = gTruthData.gTruth; % Evaluate tracking accuracy mtrics = compareTrajectories(camPoses, gTruth(addedFramesIdx), AlignmentType="similarity"); disp(['Absolute RMSE for key frame location (m): ', num2str(mtrics.AbsoluteRMSE(2))]);
Absolute RMSE for key frame location (m): 0.20043
% Plot the absolute translation error at each key frame figure ax = plot(mtrics, "absolute-translation"); view(ax, [2.70 -49.20]);
Realice un SLAM visual-inercial monocular utilizando los datos del conjunto de datos Blackbird (NYC Subway Winter). Descargue el archivo MAT que contiene las imágenes, las características intrínsecas de la cámara y las mediciones IMU.
uavDataTarFile = matlab.internal.examples.downloadSupportFile('shared_nav_vision/data','BlackbirdVIOData.tar'); % Extract the file. outputFolder = fileparts(uavDataTarFile); if (~exist(fullfile(outputFolder,"BlackbirdVIOData"),"dir")) untar(uavDataTarFile,outputFolder); end uavData = load(fullfile(outputFolder,"BlackbirdVIOData","data.mat")); images = uavData.images; timeStamps = uavData.timeStamps;
Configure los parámetros de ruido de la IMU, los intrínsecos de la cámara y la transformación extrínseca de la cámara-IMU.
imuParams = factorIMUParameters(SampleRate=100,GyroscopeNoise=0.1, ... GyroscopeBiasNoise=3e-3,AccelerometerNoise=0.3, ... AccelerometerBiasNoise=1e-3,ReferenceFrame="ENU"); intrinsics = uavData.intrinsics; camera2IMU = rigidtform3d(tform(uavData.camToIMUTransform));
Configurar el objeto SLAM visual-inercial monocular.
vslam = monovslam(intrinsics,imuParams,MaxNumPoints=2000,SkipMaxFrames=2,TrackFeatureRange=[20,100], ... CameraToIMUTransform=camera2IMU,NumPosesThreshold=40,AlignmentFraction=0.9, ... CustomBagOfFeatures=bagOfFeaturesDBoW('BlackBirdBoW.bin.gz'),LoopClosureThreshold=100);
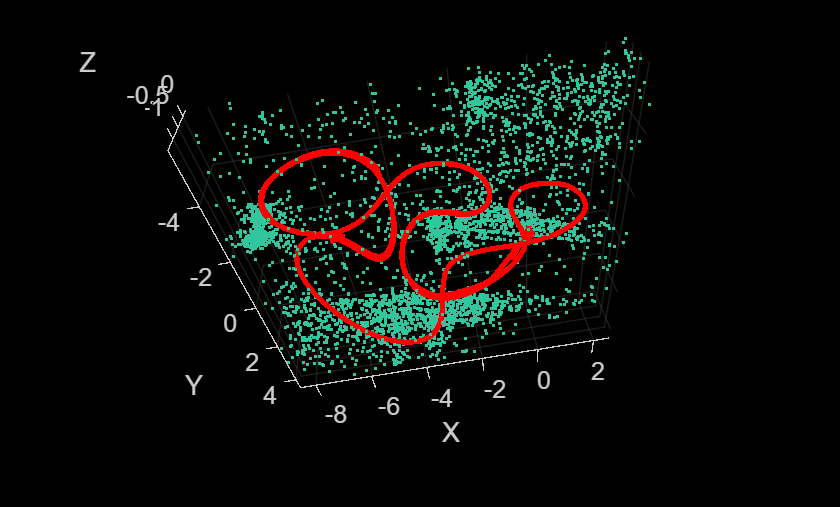
Procese todos los fotogramas de imágenes y las mediciones IMU disponibles y visualice las poses de la cámara y los puntos del mapa 3D. La secuencia no contiene ningún movimiento antes del fotograma 150.
startFrameIdx = 150; for i = startFrameIdx:length(images) if(i>startFrameIdx) imuMesurements = helperExtractIMUMeasurements(uavData, i-1, i); else imuMesurements.gyro=[]; imuMesurements.accel=[]; end addFrame(vslam, images{i}, imuMesurements.gyro, imuMesurements.accel); if hasNewKeyFrame(vslam) plot(vslam); end end
Tenga en cuenta que el objeto monovslam ejecuta varias partes del algoritmo en subprocesos separados, lo que puede introducir una latencia en el procesamiento de un cuadro de imagen agregado mediante la función addFrame.
% Plot intermediate results and wait until all images are processed while ~isDone(vslam) if hasNewKeyFrame(vslam) plot(vslam); end end
La función auxiliar a continuación se utiliza para extraer las mediciones de IMU, según las marcas de tiempo de la cámara.
function imuMesurements = helperExtractIMUMeasurements(data, startFrameIdx, currFrameIdx) timeStamps = data.timeStamps; startTimeStamp = timeStamps.imageTimeStamps(startFrameIdx); currTimeStamp = timeStamps.imageTimeStamps(currFrameIdx); [~,startIMUIdx] = min(abs(timeStamps.imuTimeStamps - startTimeStamp)); [~,currIMUIdx] = min(abs(timeStamps.imuTimeStamps - currTimeStamp)); imuMesurements.accel = data.accelReadings(startIMUIdx:(currIMUIdx-1),:); imuMesurements.gyro = data.gyroReadings(startIMUIdx:(currIMUIdx-1),:); end
Referencias
[1] Mur-Artal, Raul, J. M. M. Montiel, and Juan D. Tardos. “ORB-SLAM: A Versatile and Accurate Monocular SLAM System.” IEEE Transactions on Robotics 31, no. 5 (October 2015): 1147–63. https://doi.org/10.1109/TRO.2015.2463671.
[2] Galvez-López, D., and J. D. Tardos. “Bags of Binary Words for Fast Place Recognition in Image Sequences.” IEEE Transactions on Robotics, vol. 28, no. 5, Oct. 2012, pp. 1188–97. DOI.org (Crossref), https://doi.org/10.1109/TRO.2012.2197158.
Capacidades ampliadas
Historial de versiones
Introducido en R2025aConsulte también
Objetos
stereovslam|rgbdvslam(Computer Vision Toolbox) |factorGraph|factorIMUParameters|cameraIntrinsics(Computer Vision Toolbox) |imageDatastore
Temas
- Implement Visual SLAM in MATLAB (Computer Vision Toolbox)
- Performant and Deployable Monocular Visual SLAM (Computer Vision Toolbox)
- Monocular Visual Simultaneous Localization and Mapping (Computer Vision Toolbox)
- Monocular Visual-Inertial SLAM (Computer Vision Toolbox)