removeInvalidData
Eliminar datos de rango y ángulo no válidos
Descripción
validScan = removeInvalidData(scan,Name,Value)Name,Value.
Ejemplos
Especifique los datos de LiDAR como vectores de alcances y ángulos. Estos valores incluyen lecturas fuera del alcance de los sensores.
x = linspace(-2,2); ranges = abs((1.5).*x.^2 + 5); ranges(45:55) = 3.5; angles = linspace(-pi/2,pi/2,numel(ranges));
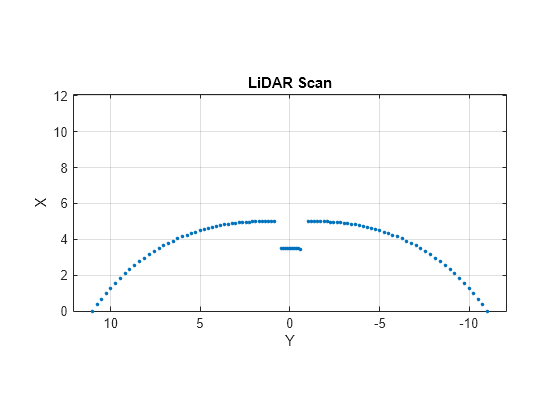
Cree un escaneo LiDAR especificando los alcances y los ángulos. Represente todos los puntos del escaneo LiDAR.
scan = lidarScan(ranges,angles); plot(scan)
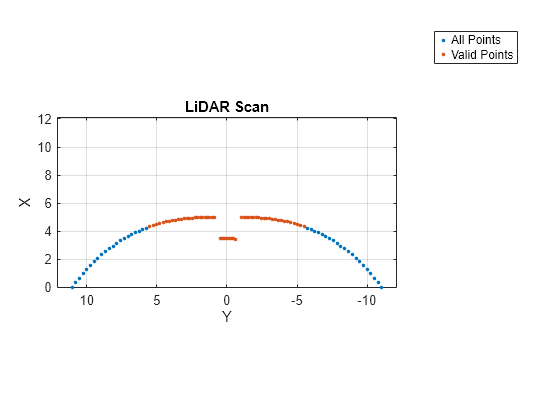
Elimine los puntos no válidos en función de un alcance mínimo y máximo especificado.
minRange = 0.1; maxRange = 7; scan2 = removeInvalidData(scan,'RangeLimits',[minRange maxRange]); hold on plot(scan2) legend('All Points','Valid Points')
Argumentos de entrada
Argumentos de par nombre-valor
Argumentos de salida
Historial de versiones
Introducido en R2019b