tunerPlotPose
Trazar estimaciones de pose de filtro durante el ajuste
Descripción
stopTuning = tunerPlotPose(params,tunerValues)params contiene las mejores estimaciones de los parámetros del filtro durante la iteración de ajuste actual. tunerValues contiene información sobre la configuración del sintonizador, los datos del sensor y los datos de ground-truth . Utilice esta función como valor para la propiedad OutputFcn del objeto tunerconfig para trazar los resultados del ajuste durante las iteraciones.
Ejemplos
Cree un objeto tunerconfiguration. Establezca la función tunerPlotPose como la función de salida del objeto.
tc = tunerconfig('imufilter','OutputFcn',@tunerPlotPose)
tc =
tunerconfig with properties:
Filter: "imufilter"
TunableParameters: ["AccelerometerNoise" "GyroscopeNoise" "GyroscopeDriftNoise" "LinearAccelerationNoise" "LinearAccelerationDecayFactor"]
StepForward: 1.1000
StepBackward: 0.5000
MaxIterations: 20
ObjectiveLimit: 0.1000
FunctionTolerance: 0
Display: iter
Cost: RMS
OutputFcn: @tunerPlotPose
Cargue datos de sensores pregrabados.
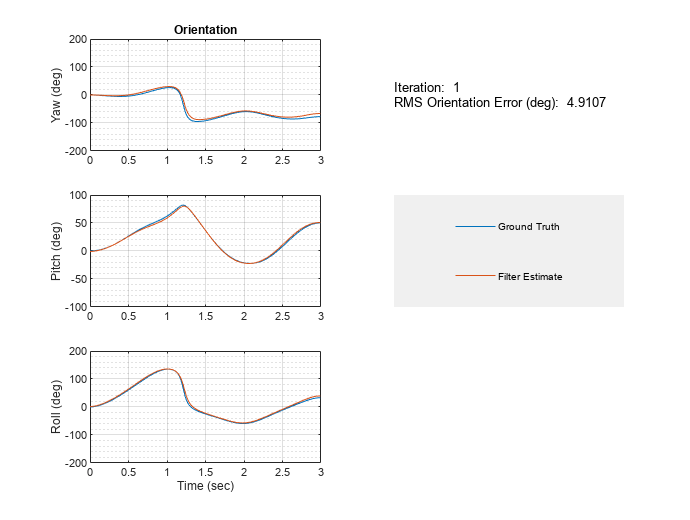
ld = load('imufilterTuneData.mat');Ajuste un objeto imufilter utilizando los datos del sensor. Los datos reales y las estimaciones se muestran en una figura.
tune(imufilter,ld.sensorData,ld.groundTruth,tc)
Iteration Parameter Metric
_________ _________ ______
1 AccelerometerNoise 0.0857
Argumentos de entrada
Argumentos de salida
Historial de versiones
Introducido en R2021a
Consulte también
tunerconfig | tunernoise | imufilter | ahrsfilter | ahrs10filter | insfilterMARG | insfilterAsync | insfilterErrorState | insfilterNonholonomic