Control Systems
As a control systems engineer, you can use MATLAB® and Simulink® at all stages of development, including plant modeling, controller design, deployment with automatic code generation, and system verification. Using MATLAB and Simulink control systems products, you can:
Model linear and nonlinear plant dynamics using basic models, system identification, or automatic parameter estimation.
Trim, linearize, and compute frequency responses for nonlinear Simulink models.
Design controllers based on plant models using root locus, Bode diagrams, LQR, LQG, and other design techniques.
Interactively analyze control system performance using overshoot, rise time, phase margin, gain margin, and other performance and stability characteristics in time and frequency domains.
Automatically tune PID, gain-scheduled, and arbitrary SISO and MIMO control systems.
Design and implement robust and model predictive controllers or use model-free control methods such as model-reference adaptive control, extremum-seeking control, reinforcement learning, and fuzzy logic.
Deploy control algorithms to embedded systems for real-time control, tuning, or parameter estimation.
Design and test condition monitoring and predictive maintenance algorithms.
Products for Control Systems
Control System Toolbox
Design and analyze control systems
System Identification Toolbox
Create linear and nonlinear dynamic system models from input-output data
Predictive Maintenance Toolbox
Design and test condition monitoring and predictive maintenance algorithms
Robust Control Toolbox
Design robust controllers for uncertain plants
Model Predictive Control Toolbox
Design and simulate model predictive controllers
Fuzzy Logic Toolbox
Design and simulate fuzzy logic systems
Simulink Control Design
Linearize models and design control systems
Simulink Design Optimization
Analyze model sensitivity and tune model parameters
Reinforcement Learning Toolbox
Design and train policies using reinforcement learning
Motor Control Blockset
Design and implement motor control algorithms
C2000 Microcontroller Blockset
Design, simulate, and implement applications for Texas Instruments C2000 microcontrollers
STM32 Microcontroller Blockset
Design, simulate, and implement applications for STMicroelectronics STM32 microcontrollers
Raspberry Pi Blockset
Design, simulate, and deploy applications for Raspberry Pi.
Topics
Plant Modeling, System Identification, and Parameter Estimation
- Control System Modeling with Model Objects (Control System Toolbox)
Build models that represent your control system using model objects. - Analyze Data in Multivariable Systems and Identify Models (System Identification Toolbox)
Collect MIMO data, estimate and compare models, and view corresponding model responses. - Online ARX Parameter Estimation for Tracking Time-Varying System Dynamics (System Identification Toolbox)
Perform online parameter estimation for a time-varying ARX model at the MATLAB command line. - Inverted Pendulum Parameter Estimation (Simulink Design Optimization)
Estimate multiple parameters of a model by iterated estimations.
Trimming, Linearization, and Frequency Response Estimation
- Compute Operating Points from Specifications Using Steady State Manager (Simulink Control Design)
Find steady-state operating points that meet specifications by trimming your Simulink model using the Steady State Manager app. - Linearize Simulink Model at Model Operating Point (Simulink Control Design)
Linearize a model at its operating point consisting of initial state values and input signals. - Frequency Response Estimation in Model Linearizer Using Pseudorandom Binary Sequence (Simulink Control Design)
Identify a frequency-domain model for a high-frequency power electronics system using a PRBS input signal in Model Linearizer.
Control Design and Tuning
- Root Locus Design (Control System Toolbox)
Design a compensator for an electrohydraulic servomechanism using root locus graphical tuning techniques. - Design Compensator Using Automated Tuning Methods (Control System Toolbox)
Tune a compensator using automated tuning methods in Control System Designer. - Tune Control Systems Using systune (Control System Toolbox)
Usesystuneto tune structured controllers for a simple application. - Design Controller for Power Electronics Model Using Simulated I/O Data (Simulink Control Design)
Use PID Tuner to identify a plant model and design a PID controller for a power electronics model that cannot be linearized. - Tune Gain-Scheduled Controller Using Closed-Loop PID Autotuner Block (Simulink Control Design)
Use Closed-Loop PID Autotuner block to tune gain-scheduled PID controller for a water-tank model in one simulation.
Predictive and Robust Control
- Design MPC Controller in Simulink (Model Predictive Control Toolbox)
Design and simulate a model predictive controller for a Simulink model using MPC Designer. - Robust Control of Active Suspension (Robust Control Toolbox)
In this example, use H∞ synthesis to design a controller for a nominal plant model. Then, use μ synthesis to design a robust controller that accounts for uncertainty in the model.
Adaptive and Intelligent Control
- Model Reference Adaptive Control of Aircraft Undergoing Wing Rock (Simulink Control Design)
Design an MRAC controller that adapts disturbance model parameters to achieve performance matching an ideal reference model. - Design and Train Agent Using Reinforcement Learning Designer (Reinforcement Learning Toolbox)
Design and train a DQN agent for a cart-pole system using the Reinforcement Learning Designer app. - Design Controller for Artificial Pancreas Using Fuzzy Logic (Fuzzy Logic Toolbox)
Design and tune a FIS tree to control insulin infusion for type-1 diabetes.
Deployable Algorithms
- Tune PI Controllers Using Field Oriented Control Autotuner Block on Real-Time Systems (Motor Control Blockset)
Compute the gain values of PI controllers within the speed and current controllers by using the Field Oriented Control Autotuner block. - Simulation and Code Generation Using Simulink Coder (Model Predictive Control Toolbox)
Simulate your MPC controller in Simulink and generate real-time code that uses either double-precision or single-precision signals. - Parameter Tuning for Digital Twins (Simulink Design Optimization)
Monitor the condition of an electric vehicle battery in the field with a deployed version of parameter estimation using Simulink Compiler™.
Related Information
Featured Examples
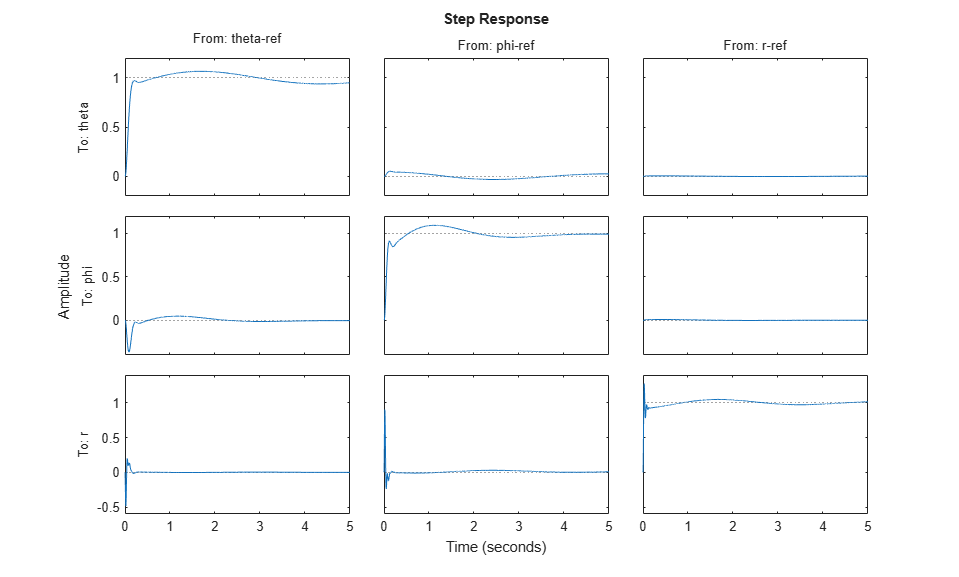
Multiloop Control of a Helicopter
Use slTuner and systune to tune a
multi-loop controller for a rotorcraft.

Design PID Controllers for Three-Phase Rectifier Using Closed-Loop PID Autotuner Block
Tune controllers for a Vienna-rectifier-based power factor corrector using the Closed-Loop PID Autotuner block.
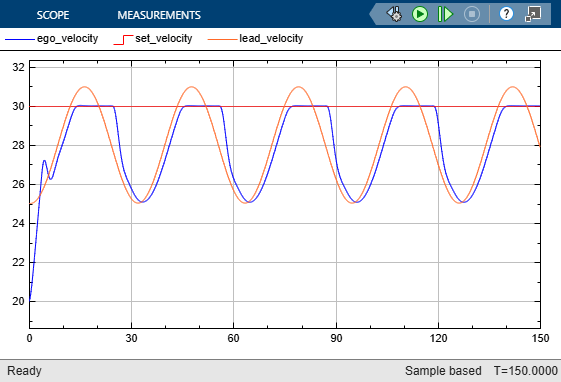
Adaptive Cruise Control Using Extremum Seeking Control
Design an extremum seeking controller to adjust controller gains for an adaptive cruise control system.

Control PMSM Loaded with Dual Motor (Dyno) Using C2000 Processors
Uses field-oriented control (FOC) to control two three-phase permanent magnet synchronous motors (PMSM) coupled in a dyno setup. Motor 1 runs in the closed-loop speed control mode. Motor 2 runs in the torque control mode and loads Motor 1 because they are mechanically coupled. You can use this example to test a motor in different load conditions.

Lane Following Using Nonlinear Model Predictive Control
Design a lane-following controller using nonlinear MPC with road curvature previewing.

Rolling Element Bearing Fault Diagnosis
Perform fault diagnosis of a rolling element bearing based on acceleration signals.