Bicycle Kinematic Model
Calcule el movimiento de un vehículo tipo automóvil utilizando el modelo cinemático de una bicicleta
Bibliotecas:
Robotics System Toolbox /
Mobile Robot Algorithms
Descripción
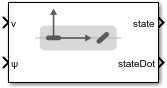
El bloque Bicycle Kinematic Model crea un modelo de vehículo de bicicleta para simular dinámicas simplificadas de vehículos tipo automóvil. Este modelo representa un vehículo con dos ejes definidos por la longitud entre los ejes, Wheel base. La rueda delantera se puede girar con el ángulo de dirección psi. El rumbo del vehículo theta se define en el centro del eje trasero.

Ejemplos
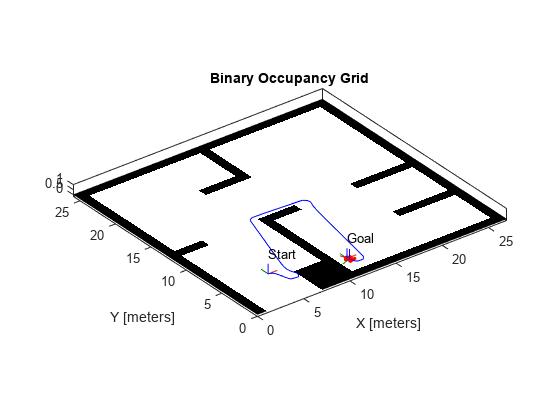
Planificar una trayectoria para un robot de bicicleta en Simulink
Ejecute una trayectoria libre de obstáculos con un robot de bicicleta en Simulink® con planificación de trayectorias basada en roadmap probabilístico (PRM) y control de Pure Pursuit.
Puertos
Entrada
Salida
Parámetros
Referencias
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control 1st ed. Cambridge, MA: Cambridge University Press, 2017.
[2] Corke, Peter I. Robotics, Vision and Control: Fundamental Algorithms in MATLAB. Springer, 2011.
Capacidades ampliadas
Historial de versiones
Introducido en R2019b