bsplinepolytraj
Generar trayectorias polinomiales con B-splines
Descripción
[ genera una trayectoria B-spline cúbica por tramos que cae en el polígono de control definido por q,qd,qdd,pp] = bsplinepolytraj(controlPoints,tInterval,tSamples)controlPoints. La trayectoria se muestrea uniformemente entre los tiempos de inicio y fin dados en tInterval. La función devuelve las posiciones, velocidades y aceleraciones de las muestras de tiempo de entrada, tSamples. También devuelve la forma polinomial por tramos pp de la trayectoria polinomial con relación al tiempo.
Ejemplos
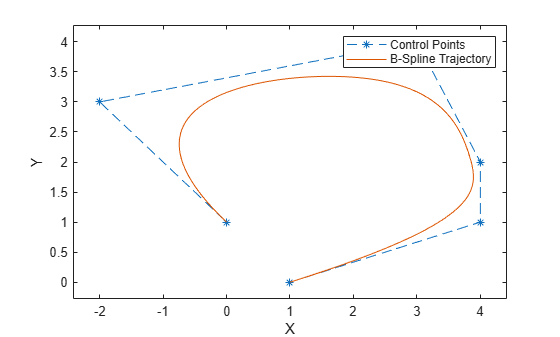
Utilice la función bsplinepolytraj con un conjunto determinado de puntos de control xy en 2D. La B-spline utiliza estos puntos de control para crear una trayectoria dentro del polígono. También se indican los tiempos de inicio y fin de la trayectoria.
cpts = [1 4 4 3 -2 0; 0 1 2 4 3 1]; tpts = [0 5];
Calcule la trayectoria B-spline. La función genera las posiciones de la trayectoria, (q), la velocidad (qd), la aceleración (qdd), el vector de tiempo (tvec) y los coeficientes polinomiales (pp) del polinomio que alcanza los waypoints utilizando los puntos de control.
tvec = 0:0.01:5; [q,qd,qdd,pp] = bsplinepolytraj(cpts,tpts,tvec);
Represente los resultados. Muestre los puntos de control y la trayectoria resultante dentro de ellos.
figure plot(cpts(1,:),cpts(2,:),'*--') hold on plot(q(1,:),q(2,:)) xlabel("X") ylabel("Y") legend("Control Points","B-Spline Trajectory") axis padded hold off
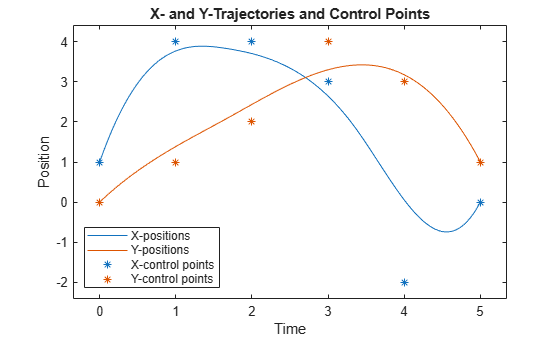
Represente la posición de cada uno de los elementos de la trayectoria B-spline. Estas trayectorias son polinomios cúbicos por tramos parametrizados en el tiempo.
figure plot(tvec,q); hold on ax = gca; ax.ColorOrderIndex = 1; scatter([0:length(cpts)-1],cpts,'*') xlabel("Time") ylabel("Position") title("X- and Y-Trajectories and Control Points") axis padded legend("X-positions","Y-positions","X-control points","Y-control points",Location="southwest") hold off
Cree waypoints para interpolarlos con una B-spline.
wpts1 = [0 1 2.1 8 4 3]; wpts2 = [0 1 1.3 .8 .3 .3]; wpts = [wpts1; wpts2]; L = length(wpts) - 1;
Forme matrices utilizadas para calcular los puntos internos del polígono de control.
r = zeros(L+1, size(wpts,1)); A = eye(L+1); for i= 1:(L-1) A(i+1,(i):(i+2)) = [1 4 1]; r(i+1,:) = 6*wpts(:,i+1)'; end
Anule los puntos finales, y seleccione r0 y rL.
A(2,1:3) = [3/2 7/2 1]; A(L,(L-1):(L+1)) = [1 7/2 3/2]; r(1,:) = (wpts(:,1) + (wpts(:,2) - wpts(:,1))/2)'; r(end,:) = (wpts(:,end-1) + (wpts(:,end) - wpts(:,end-1))/2)'; dInterior = (A\r)';
Construya un polígono de control completo y use bsplinepolytraj para calcular un polinomio con nuevos puntos de control.
cpts = [wpts(:,1) dInterior wpts(:,end)]; t = 0:0.01:1; q = bsplinepolytraj(cpts, [0 1], t);
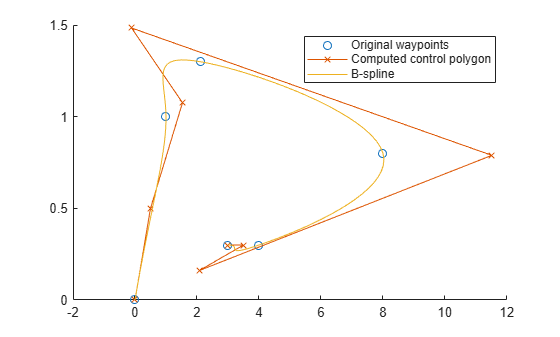
Represente los resultados. Muestre los waypoints originales, el polígono calculado y la B-spline interpolada.
figure; hold all plot(wpts1, wpts2, 'o'); plot(cpts(1,:), cpts(2,:), 'x-'); plot(q(1,:), q(2,:)); legend('Original waypoints', 'Computed control polygon', 'B-spline');
[1] Farin, Sección 9.1
Argumentos de entrada
Argumentos de salida
Referencias
[1] Farin, Gerald E. Curves and Surfaces for Computer Aided Geometric Design: A Practical Guide. San Diego, CA: Academic Press, 1993.
Capacidades ampliadas
Historial de versiones
Introducido en R2019a
Consulte también
contopptraj | cubicpolytraj | quinticpolytraj | rottraj | transformtraj | trapveltraj