transformtraj
Generar trayectorias entre dos transformaciones
Sintaxis
Descripción
Ejemplos
Cree transformaciones a partir de dos orientaciones y posiciones. Especifique el intervalo de tiempo y el vector de tiempos para interpolar.
t0 = axang2tform([0 1 1 pi/4])*trvec2tform([0 0 0]); tF = axang2tform([1 0 1 6*pi/5])*trvec2tform([1 1 1]); tInterval = [0 1]; tvec = 0:0.01:1;
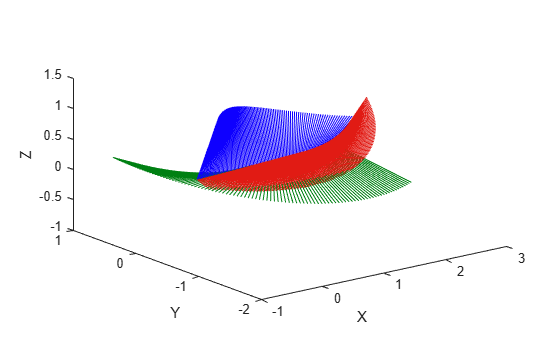
Interpole entre los puntos. Represente la trayectoria usando plotTransforms. Convierta las transformaciones en rotaciones de cuaterniones y transiciones lineales. La figura muestra todas las transformaciones intermedias del marco de coordenadas.
[tfInterp, v1, a1] = transformtraj(t0,tF,tInterval,tvec); rotations = tform2quat(tfInterp); translations = tform2trvec(tfInterp); plotTransforms(translations,rotations) xlabel('X') ylabel('Y') zlabel('Z')
Cree la primera transformación de una rotación eje-ángulo y cree la transformación final tanto de una rotación eje-ángulo como de una traslación.
t0 = se3([0 1 1 pi/4],"axang"); tF = se3([1 0 1 6*pi/5],"axang")*se3([1 1 1],"trvec");
Especifique el intervalo de tiempo y el vector de tiempos para interpolar.
tInterval = [0 1]; tvec = 0:0.01:1;
Interpole entre las transformaciones. Represente la trayectoria usando plotTransforms.
[tfInterp] = transformtraj(t0,tF,tInterval,tvec); plotTransforms(tfInterp(1:10:end))

Argumentos de entrada
Argumentos de par nombre-valor
Argumentos de salida
Referencias
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control. Cambridge University Press, 2017.
Capacidades ampliadas
Historial de versiones
Introducido en R2019aConsulte también
bsplinepolytraj | contopptraj | cubicpolytraj | quinticpolytraj | rottraj | trapveltraj