ss2tf
Convert state-space representation to transfer function
Description
Examples
A one-dimensional discrete-time oscillating system consists of a unit mass, , attached to a wall by a spring of unit elastic constant. A sensor samples the acceleration, , of the mass at Hz.

Generate 50 time samples. Define the sampling interval .
Fs = 5; dt = 1/Fs; N = 50; t = dt*(0:N-1);
The oscillator can be described by the state-space equations
where is the state vector, and are respectively the position and velocity of the mass, and the matrices
A = [cos(dt) sin(dt);-sin(dt) cos(dt)]; B = [1-cos(dt);sin(dt)]; C = [-1 0]; D = 1;
The system is excited with a unit impulse in the positive direction. Use the state-space model to compute the time evolution of the system starting from an all-zero initial state.
u = [1 zeros(1,N-1)]; x = [0;0]; for k = 1:N y(k) = C*x + D*u(k); x = A*x + B*u(k); end
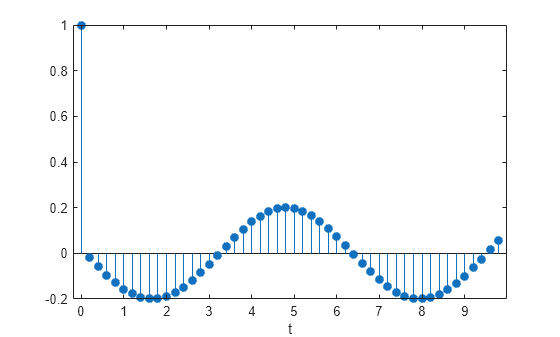
Plot the acceleration of the mass as a function of time.
stem(t,y,'filled') xlabel('t')

Compute the time-dependent acceleration using the transfer function H(z) to filter the input. Plot the result.
[b,a] = ss2tf(A,B,C,D); yt = filter(b,a,u); stem(t,yt,'filled') xlabel('t')

The transfer function of the system has an analytic expression:
Use the expression to filter the input. Plot the response.
bf = [1 -(1+cos(dt)) cos(dt)]; af = [1 -2*cos(dt) 1]; yf = filter(bf,af,u); stem(t,yf,'filled') xlabel('t')
The result is the same in all three cases.
An ideal one-dimensional oscillating system consists of two unit masses, and , confined between two walls. Each mass is attached to the nearest wall by a spring of unit elastic constant. Another such spring connects the two masses. Sensors sample and , the accelerations of the masses, at Hz.

Specify a total measurement time of 16 s. Define the sampling interval .
Fs = 16; dt = 1/Fs; N = 257; t = dt*(0:N-1);
The system can be described by the state-space model
where is the state vector and and are respectively the location and the velocity of the th mass. The input vector and the output vector . The state-space matrices are
the continuous-time state-space matrices are
and denotes an identity matrix of the appropriate size.
Ac = [0 1 0 0; -2 0 1 0; 0 0 0 1; 1 0 -2 0]; A = expm(Ac*dt); Bc = [0 0; 1 0; 0 0; 0 1]; B = Ac\(A-eye(4))*Bc; C = [-2 0 1 0; 1 0 -2 0]; D = eye(2);
The first mass, , receives a unit impulse in the positive direction.
ux = [1 zeros(1,N-1)]; u0 = zeros(1,N); u = [ux;u0];
Use the model to compute the time evolution of the system starting from an all-zero initial state.
x = [0 0 0 0]'; y = zeros(2,N); for k = 1:N y(:,k) = C*x + D*u(:,k); x = A*x + B*u(:,k); end
Plot the accelerations of the two masses as functions of time.
stem(t,y','.') xlabel('t') legend('a_1','a_2') title('Mass 1 Excited') grid

Convert the system to its transfer function representation. Find the response of the system to a positive unit impulse excitation on the first mass.
[b1,a1] = ss2tf(A,B,C,D,1); y1u1 = filter(b1(1,:),a1,ux); y1u2 = filter(b1(2,:),a1,ux);
Plot the result. The transfer function gives the same response as the state-space model.
stem(t,[y1u1;y1u2]','.') xlabel('t') legend('a_1','a_2') title('Mass 1 Excited') grid

The system is reset to its initial configuration. Now the other mass, , receives a unit impulse in the positive direction. Compute the time evolution of the system.
u = [u0;ux]; x = [0;0;0;0]; for k = 1:N y(:,k) = C*x + D*u(:,k); x = A*x + B*u(:,k); end
Plot the accelerations. The responses of the individual masses are switched.
stem(t,y','.') xlabel('t') legend('a_1','a_2') title('Mass 2 Excited') grid

Find the response of the system to a positive unit impulse excitation on the second mass.
[b2,a2] = ss2tf(A,B,C,D,2); y2u1 = filter(b2(1,:),a2,ux); y2u2 = filter(b2(2,:),a2,ux);
Plot the result. The transfer function gives the same response as the state-space model.
stem(t,[y2u1;y2u2]','.') xlabel('t') legend('a_1','a_2') title('Mass 2 Excited') grid

Input Arguments
Output Arguments
More About
Version History
Introduced before R2006a