Lidar Code-Along Tutorial
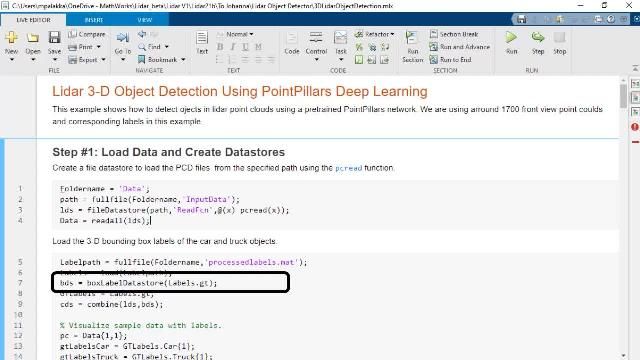
Learn how to load point cloud data as a FileDatastore with the pcread function, load bounding box labels using the boxLabelDatastore function, and split training and testing sets.
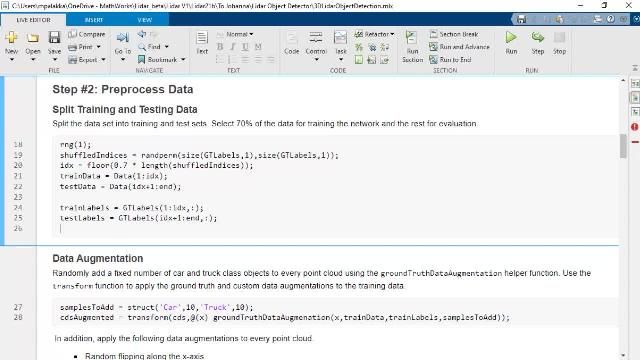
Learn how to split a data set into training and test sets, randomly add a fixed number of car and truck class objects to every point cloud, and use augmentation techniques such as flipping, scaling, rotation, and translation.
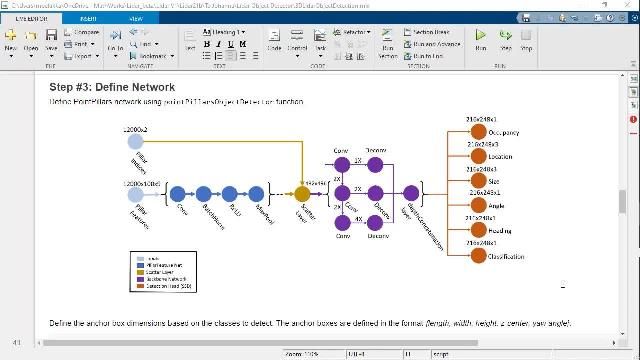
Define anchor boxes, pillars for the PointPillars network, and PointPillars network.
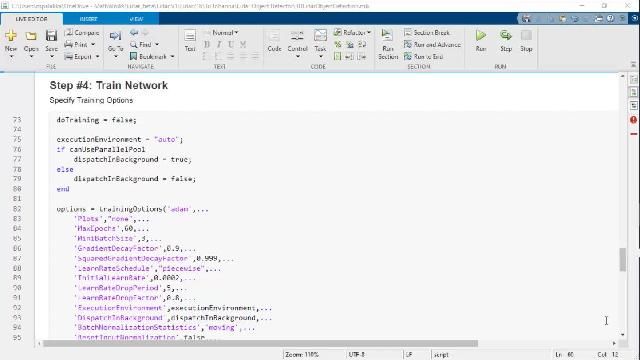
Learn how to test PointPillars network on test dataset, run the detector on the test point cloud, and display detected output point cloud with bounding boxes.
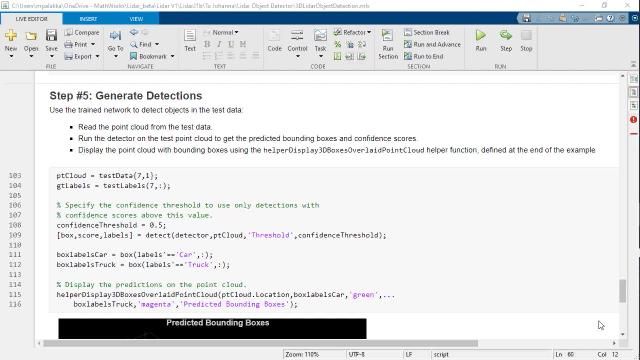
Learn how to use the trained network to detect objects in the test data.