A PID Tuning Guide | Understanding PID Control, Part 4
From the series: Understanding PID Control
Brian Douglas
It can be difficult to navigate all the resources that promise to explain the secrets of PID tuning. Some proclaim that PID tuning is an art that requires finesse and experience, while others are adamant that tuning requires a few rigid rules. Why is there such a vast difference? It is because PID tuning depends on the characteristics of the system. For that reason, a one-size-fits-all tuning method doesn’t exist.
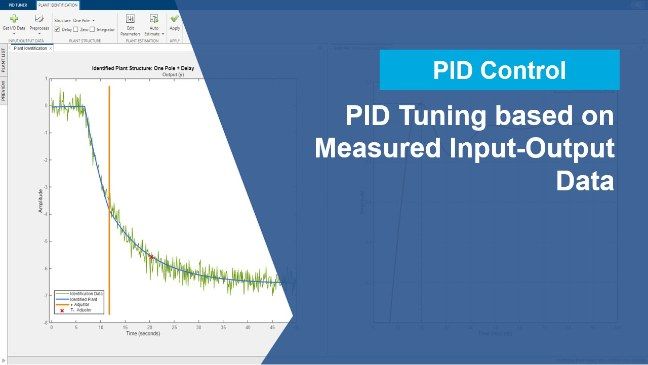
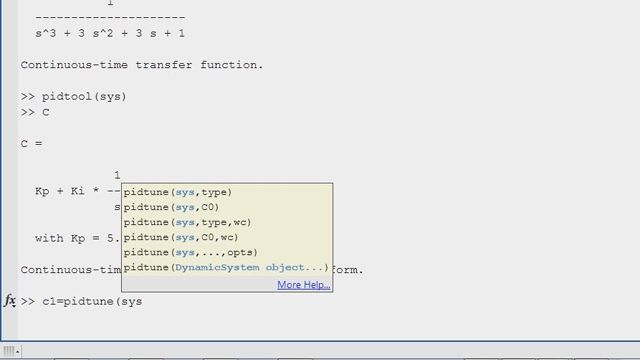
Get an overview of various PID tuning techniques ranging from model-based tuning to heuristic methods such as Ziegler-Nichols and Cohen-Coon.
Published: 9 Jul 2018