stepinfo
Tiempo de subida, tiempo de establecimiento y otras características de respuesta al escalón
Sintaxis
Descripción
stepinfo permite calcular características de respuesta al escalón para un modelo de sistema dinámico o para un arreglo de datos de respuesta al escalón. Para una respuesta al escalón y(t), stepinfo calcula las características relacionadas con yinit y yfinal, donde yinit es el desplazamiento inicial, es decir, el valor antes de aplicar el escalón, y yfinal es el valor de estado estacionario de la respuesta. Estos valores dependen de la sintaxis que utilice.
En un modelo de sistema dinámico
sys,stepinfoutiliza yinit = 0 e yfinal = valor de estado estacionario.En un arreglo de datos de respuesta al escalón
[y,t],stepinfoutiliza yinit = 0 y yfinal = último valor de muestreo dey, a no ser que especifique de manera explícita estos valores.
Para más información sobre cómo stepinfo calcula las características de respuesta al escalón, consulte Algoritmos.
La siguiente figura ilustra alguna de las características que stepinfo calcula para una respuesta al escalón. Para esta respuesta, supongamos que y(t) = 0 para t < 0, por tanto yinit = 0.

S = stepinfo(sys)sys. Esta sintaxis utiliza yinit = 0 y yfinal = valor de estado estacionario para calcular las características que dependen de estos valores.
Para utilizar esta sintaxis, se requiere una licencia de Control System Toolbox™.
S = stepinfo(y,t)y y un vector de tiempo t correspondiente. En las respuestas de sistemas SISO, y es un vector con el mismo número de entradas que t. En los datos de respuesta MIMO, y es un arreglo que contiene respuestas de cada canal de E/S. Esta sintaxis utiliza yinit = 0 y el último valor en y (o el último valor en los datos de respuesta correspondientes de cada canal) como yfinal.
S = stepinfo(y,t,yfinal)yfinal. Esta sintaxis es útil cuando se sabe que la respuesta esperada del sistema de estado estacionario es diferente del último valor en y por razones como el ruido de medición. Esta sintaxis utiliza yinit = 0.
En las respuestas SISO, t e y son vectores con la misma longitud NS. En los sistemas con NU entradas y NY salidas, puede especificar y como un arreglo de NS por NY por NU (consulte step) e yfinal como un arreglo de NY por NU. Luego, stepinfo devuelve un arreglo de estructuras S de NY por NU de las características de respuesta correspondiente a cada par E/S.
S = stepinfo(y,t,yfinal,yinit)yinit. Esta sintaxis es útil cuando los datos y cuentan con un desplazamiento inicial; es decir, y es distinto de cero antes de que se produzca el escalón.
En las respuestas SISO, t e y son vectores con la misma longitud NS. En los sistemas con NU entradas y NY salidas, puede especificar y como un arreglo de NS por NY por NU e yinit como un arreglo de NY por NU. Luego, stepinfo devuelve un arreglo de estructuras S de NY por NU de las características de respuesta correspondiente a cada par E/S.
S = stepinfo(___,RiseTimeLimits=RT)RT = [0.1 0.9]). El umbral superior RT(2) también se utiliza para calcular SettlingMin y SettlingMax. Estos son los valores mínimos y máximos de la respuesta que se produce una vez que la respuesta alcanza el umbral superior. Puede utilizar esta sintaxis con cualquiera de las combinaciones de entrada/argumento anteriores.
Ejemplos
Calcule las características de respuesta al escalón, tales como tiempo de subida, tiempo de establecimiento y sobreimpulso, en un modelo de sistema dinámico. Para este ejemplo, cree una función de transferencia en tiempo continuo:
.
Cree la función de transferencia y examine la respuesta al escalón.
sys = tf([1 5 5],[1 1.65 5 6.5 2]); stepplot(sys)
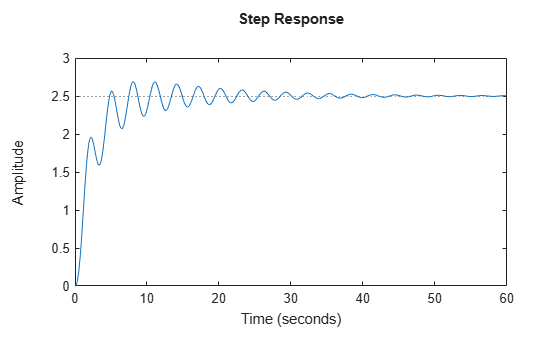
La gráfica muestra que la respuesta sube en pocos segundos y, luego se produce un ringdown hasta un valor de estado estacionario de unos 2,5. Calcule las características de esta respuesta con stepinfo.
S = stepinfo(sys)
S = struct with fields:
RiseTime: 3.8456
TransientTime: 27.9762
SettlingTime: 27.9762
SettlingMin: 2.0689
SettlingMax: 2.6873
Overshoot: 7.4915
Undershoot: 0
Peak: 2.6873
PeakTime: 8.0530
En este caso, la función utiliza = 0 para calcular características en el modelo de sistema dinámico sys.
De forma predeterminada, el tiempo de establecimiento es el tiempo que tarda el error en permanecer por debajo del 2% de . El resultado S.SettlingTime muestra que para sys, esta condición se produce después de 28 segundos. La definición predeterminada de tiempo de subida es el tiempo que tarda la respuesta en ir del 10% al 90% del recorrido desde =0 a . S.RiseTime muestra que para sys, esta subida se produce en menos de 4 segundos. El sobreimpulso máximo se devuelve en S.Overshoot. En este sistema, el valor pico S.Peak, que se produce en el tiempo S.PeakTime, rebasa en aproximadamente un 7,5% el valor de estado estacionario.
En un sistema MIMO, stepinfo devuelve un arreglo de estructuras en el que cada entrada contiene las características de respuesta del correspondiente canal de E/S del sistema. Para este ejemplo, utilice un sistema en tiempo discreto de dos salidas y dos entradas. Calcule las características de respuesta al escalón.
A = [0.68 -0.34; 0.34 0.68]; B = [0.18 -0.05; 0.04 0.11]; C = [0 -1.53; -1.12 -1.10]; D = [0 0; 0.06 -0.37]; sys = ss(A,B,C,D,0.2); S = stepinfo(sys)
S=2×2 struct array with fields:
RiseTime
TransientTime
SettlingTime
SettlingMin
SettlingMax
Overshoot
Undershoot
Peak
PeakTime
Acceda a las características de respuesta para un canal de E/S concreto indexando en S. Por ejemplo, examine las características de respuesta para la respuesta desde la primera entrada hasta la segunda salida de sys, correspondiente a S(2,1).
S(2,1)
ans = struct with fields:
RiseTime: 0.4000
TransientTime: 2.8000
SettlingTime: 3
SettlingMin: -0.6724
SettlingMax: -0.5188
Overshoot: 24.6476
Undershoot: 11.1224
Peak: 0.6724
PeakTime: 1
Para acceder a un valor concreto, utilice notación de puntos. Por ejemplo, extraiga el tiempo de subida del canal (2, 1).
rt21 = S(2,1).RiseTime
rt21 = 0.4000
Desde R2026a
Cuando especifica un arreglo de sistemas LTI, stepinfo devuelve un arreglo de estructuras con dimensiones que coinciden con el arreglo de modelos especificado. Cada elemento del arreglo de estructuras contiene las características del modelo LTI correspondiente del arreglo de modelos.
Cree un arreglo de 3 por 1 de modelos SISO de segundo orden con diferentes coeficientes de amortiguación.
sys1 = tf(4,[1 1 4]); sys2 = tf(4,[1 2 4]); sys3 = tf(4,[1 4 4]); sysArray = stack(1,sys1,sys2,sys3);
Vea las dimensiones del arreglo de modelos resultante.
size(sysArray)
3x1 array of transfer functions. Each model has 1 outputs and 1 inputs.
Calcule las características de respuesta al escalón para el arreglo de modelos.
infoArray = stepinfo(sysArray)
infoArray = 1×1×3 struct array with fields:
RiseTime
TransientTime
SettlingTime
SettlingMin
SettlingMax
Overshoot
Undershoot
Peak
PeakTime
Puede utilizar SettlingTimeThreshold y RiseTimeLimits para cambiar el porcentaje predeterminado para los tiempos de establecimiento y de subida, respectivamente, como se describe en la sección Algoritmos. Para este ejemplo, utilice el sistema dado por:
.
Cree la función de transferencia.
sys = tf([1 5 5],[1 1.65 5 6.5 2]);
Calcule el tiempo que tarda el error en la respuesta de sys en permanecer por debajo del 0,5% del intervalo . Para ello, establezca SettlingTimeThreshold en 0.5% o 0.005.
S1 = stepinfo(sys,SettlingTimeThreshold=0.005); st1 = S1.SettlingTime
st1 = 46.1325
Calcule el tiempo que tarda la respuesta de sys en subir del 5% al 95% del recorrido desde hasta . Para ello, establezca RiseTimeLimits en un vector con esos límites.
S2 = stepinfo(sys,RiseTimeLimits=[0.05 0.95]); rt2 = S2.RiseTime
rt2 = 4.1690
Puede definir porcentajes tanto para el tiempo de establecimiento como para el tiempo de subida en el mismo cálculo.
S3 = stepinfo(sys,... SettlingTimeThreshold=0.005, ... RiseTimeLimits=[0.05 0.95])
S3 = struct with fields:
RiseTime: 4.1690
TransientTime: 46.1325
SettlingTime: 46.1325
SettlingMin: 2.0689
SettlingMax: 2.6873
Overshoot: 7.4915
Undershoot: 0
Peak: 2.6873
PeakTime: 8.0530
Puede extraer las características de respuesta a partir de los datos de respuesta al escalón, incluso si no dispone de un modelo del sistema. Por ejemplo, supongamos que ha medido la respuesta del sistema para una entrada en escalón y que ha guardado los datos de respuesta resultantes en un vector y de valores de respuesta en los tiempos almacenados en otro vector t. Cargue los datos de respuesta y examínelos.
load StepInfoData t y plot(t,y)
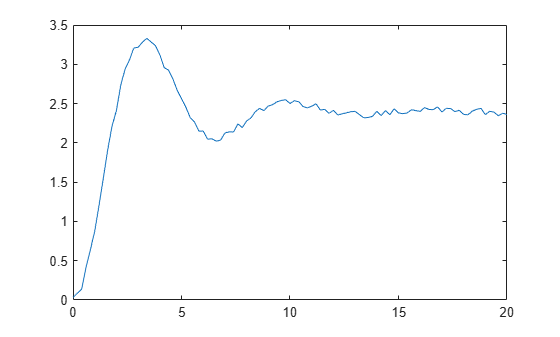
Calcule las características de respuesta al escalón a partir de estos datos de respuesta con stepinfo. Si no especifica el valor de respuesta de estado estacionario yfinal, entonces stepinfo asume que el último valor del vector de respuesta y es la respuesta de estado estacionario. Dado que los datos tienen ruido, es posible que el último valor en y no sea el valor de respuesta de estado estacionario verdadero. Cuando sepa cuál debería ser el valor de estado estacionario, puede proporcionarlo en stepinfo. En este ejemplo, supongamos que la respuesta de estado estacionario es 2.4.
S1 = stepinfo(y,t,2.4)
S1 = struct with fields:
RiseTime: 1.2897
TransientTime: 19.6478
SettlingTime: 19.6439
SettlingMin: 2.0219
SettlingMax: 3.3302
Overshoot: 38.7575
Undershoot: 0
Peak: 3.3302
PeakTime: 3.4000
Debido al ruido en los datos, la definición predeterminada del tiempo de establecimiento es demasiado estricta, lo que da como resultado un valor arbitrario de casi 20 segundos. Para permitir ruido, aumente el umbral del tiempo de establecimiento del valor predeterminado 2% al 5%.
S2 = stepinfo(y,t,2.4,SettlingTimeThreshold=0.05)
S2 = struct with fields:
RiseTime: 1.2897
TransientTime: 10.4201
SettlingTime: 10.4149
SettlingMin: 2.0219
SettlingMax: 3.3302
Overshoot: 38.7575
Undershoot: 0
Peak: 3.3302
PeakTime: 3.4000
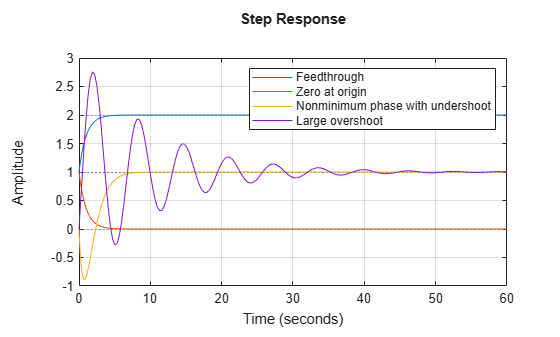
El tiempo de establecimiento y el tiempo transitorio son iguales cuando el error pico es igual al intervalo , que es el caso de los modelos sin subimpulso o alimentación, y que presentan menos del 100% de sobreimpulso. Tienden a ser diferentes en los modelos con alimentación, ceros en el origen, ceros inestables (subimpulso) o con gran sobreimpulso.
Considere los siguientes modelos.
sys1: sistema con alimentación directosys2: sistema con cero en el origensys3: sistema de fase no mínima con subimpulsosys4: sistema con gran sobreimpulso
s = tf("s"); sys1 = 1+tf(1,[1 1]); sys2 = tf([1 0],[1 1]); sys3 = tf([-3 1],[1 2 1]); sys4 = (s/0.5 + 1)/(s^2 + 0.2*s + 1); step(sys1,sys2,sys3,sys4) grid on legend("Feedthrough", ... "Zero at origin", ... "Nonminimum phase with undershoot", ... "Large overshoot")
Calcule las características de respuesta al escalón.
S1 = stepinfo(sys1)
S1 = struct with fields:
RiseTime: 1.6095
TransientTime: 3.9121
SettlingTime: 3.2190
SettlingMin: 1.8005
SettlingMax: 1.9993
Overshoot: 0
Undershoot: 0
Peak: 1.9993
PeakTime: 7.3222
S2 = stepinfo(sys2)
S2 = struct with fields:
RiseTime: 0
TransientTime: 3.9121
SettlingTime: NaN
SettlingMin: 6.6069e-04
SettlingMax: 1
Overshoot: Inf
Undershoot: Inf
Peak: 1
PeakTime: 0
S3 = stepinfo(sys3)
S3 = struct with fields:
RiseTime: 2.9198
TransientTime: 6.5840
SettlingTime: 7.3229
SettlingMin: 0.9008
SettlingMax: 1.0000
Overshoot: 0
Undershoot: 88.9301
Peak: 1.0000
PeakTime: 14.6905
S4 = stepinfo(sys4)
S4 = struct with fields:
RiseTime: 0.3896
TransientTime: 40.3317
SettlingTime: 46.5052
SettlingMin: -0.2796
SettlingMax: 2.7571
Overshoot: 175.7137
Undershoot: 27.9629
Peak: 2.7571
PeakTime: 1.8850
Examine las gráficas y las características. En estos modelos, el tiempo de establecimiento y el tiempo transitorio son diferentes porque el error pico sobrepasa el intervalo entre el valor inicial y el final. En modelos como sys2, el tiempo de establecimiento se devuelve como NaN porque el valor de estado estacionario es cero.
En este ejemplo, calcule las características de respuesta al escalón a partir de datos de respuesta al escalón con un desplazamiento inicial. Esto significa que el valor de los datos de respuesta es distinto de cero antes de que se produzca el escalón.
Cargue los datos de respuesta al escalón y examine la gráfica.
load stepDataOffset.mat
plot(stepOffset.Time,stepOffset.Data)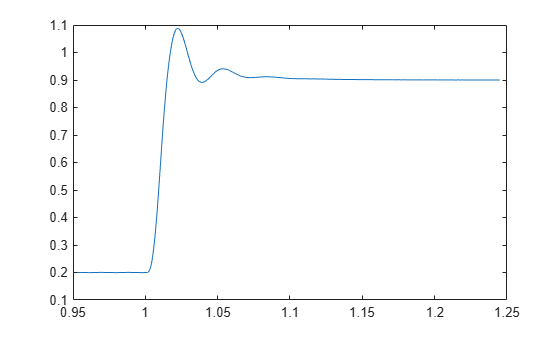
Si no especifica yfinal ni yinit, stepinfo asume que yfinal es el último valor en el vector de respuesta y y que yinit es cero. Cuando sepa cuáles son los valores de estado estacionario e iniciales, puede proporcionarlos en stepinfo. En este caso, el estado estacionario de la respuesta yfinal es 0.9 y el desplazamiento inicial yinit es 0.2.
Calcule las características de respuesta al escalón a partir de estos datos de respuesta.
S = stepinfo(stepOffset.Data,stepOffset.Time,0.9,0.2)
S = struct with fields:
RiseTime: 0.0084
TransientTime: 1.0662
SettlingTime: 1.0662
SettlingMin: 0.8461
SettlingMax: 1.0878
Overshoot: 26.8259
Undershoot: 0.0429
Peak: 0.8878
PeakTime: 1.0225
En este caso, el valor pico de esta respuesta es 0.8878 porque stepinfo mide la desviación máxima a partir de yinit.
Argumentos de entrada
Sistema dinámico, especificado como un modelo de sistema dinámico SISO o MIMO.
También puede especificar un arreglo de modelos de sistemas dinámicos, que es útil para procesar por lotes un conjunto de modelos relacionados. (desde R2026a)
Puede utilizar los siguientes tipos de sistemas dinámicos:
Modelos LTI numéricos en tiempo continuo o en tiempo discreto, como modelos
tf(Control System Toolbox),zpk(Control System Toolbox) oss(Control System Toolbox).Modelos LTI generalizados o con incertidumbre, como modelos
genss(Control System Toolbox) ouss(Robust Control Toolbox). El uso de modelos con incertidumbre requiere Robust Control Toolbox™. En el caso de modelos generalizados,stepinfocalcula las características de respuesta al escalón con el valor actual de los bloques ajustables y el valor nominal de los bloques con incertidumbre.Modelos LTI identificados, como modelos
idtf,idssoidproc.
Datos de respuesta al escalón, especificados como una de las siguientes opciones:
En el caso de datos de respuesta SISO, un vector de longitud
Ns, dondeNses el número de muestras en los datos de respuestaEn el caso de datos de respuesta MIMO, un arreglo de
NsporNyporNu, dondeNyes el número de salidas del sistema yNu, el de entradas al sistema
Puede especificar datos de respuesta complejos con y. (desde R2025a)
Vector de tiempo correspondiente a los datos de respuesta en y, especificado como un vector de longitud Ns.
Valor de estado estacionario, especificado como un escalar o un arreglo.
En el caso de datos de respuesta SISO, especifique un valor escalar.
En el caso de datos de respuesta MIMO, especifique un arreglo de
NyporNu, donde cada entrada proporciona el valor de respuesta de estado estacionario para el canal del sistema correspondiente.
Puede especificar un valor final complejo con yfinal. (desde R2025a)
Si no proporciona yfinal, stepinfo utiliza el último valor del canal correspondiente de y como valor de respuesta de estado estacionario.
Este argumento solo es admisible cuando se proporcionan datos de respuesta al escalón como una entrada. En el caso de un modelo de sistema dinámico sys como una entrada, stepinfo utiliza yfinal = valor de estado estacionario para calcular las características que dependen de este valor.
Valor de y antes de que se produzca el escalón, especificado como un escalar o un arreglo.
En el caso de datos de respuesta SISO, especifique un valor escalar.
En el caso de datos de respuesta MIMO, especifique un arreglo de
NyporNu, donde cada entrada proporciona el valor de respuesta inicial para el canal del sistema correspondiente.
Puede especificar un valor inicial complejo con yinit. (desde R2025a)
Si no proporciona yinit, stepinfo utiliza cero como valor de respuesta inicial.
La respuesta y(0) en t = 0 es igual a yinit en los sistemas sin alimentación. No obstante, ambas cantidades son diferentes en presencia de alimentación, debido a la discontinuidad en t = 0.
Por ejemplo, la siguiente figura muestra la respuesta al escalón de un sistema con alimentación sys = tf([-1 0.2 1],[1 0.7 1]).

En este caso, yinit es cero y el valor de alimentación es –1.
Este argumento solo es admisible cuando se proporcionan datos de respuesta al escalón como una entrada. En el caso de un modelo de sistema dinámico sys como una entrada, stepinfo utiliza yinit = 0 para calcular las características que dependen de este valor.
Umbral para definir el tiempo transitorio y el tiempo de establecimiento, especificado como un valor escalar entre 0 y 1. Para cambiar las definiciones predeterminadas de tiempo transitorio y de establecimiento (consulte Algoritmos), establezca ST con un valor diferente. Por ejemplo, para medir cuando el error cae por debajo del 5%, establezca ST en 0.05.
Umbral para definir el tiempo de subida, especificado como un vector fila de 2 elementos con valores no descendientes entre 0 y 1. Para cambiar la definición predeterminada de tiempo de subida (consulte Algoritmos), establezca RT con un valor diferente. Por ejemplo, para definir el tiempo de subida como el tiempo que tarda la respuesta en subir del 5% al 95% desde el valor inicial hasta el valor de estado estacionario, establezca RT en [0.05 0.95].
Argumentos de salida
Algoritmos
En el caso de respuestas al escalón y(t), stepinfo calcula las características relativas a yinit y yfinal. De forma predeterminada, en un modelo de sistema dinámico sys, stepinfo utiliza yinit = 0 e yfinal = valor de estado estacionario.
Esta tabla muestra cómo stepinfo calcula cada característica.
| Característica de respuesta al escalón | Descripción |
|---|---|
RiseTime | Tiempo que tarda la respuesta en subir del 10% al 90% del recorrido desde yinit hasta yfinal |
TransientTime | El primer tiempo T es tal que el error |y(t) – yfinal| ≤ SettlingTimeThreshold × emax para t ≥ T, donde emax es el error máximo |y(t) – yfinal| para t ≥ 0. De forma predeterminada, SettlingTimeThreshold = 0.02 (2% del error pico). El tiempo transitorio mide la rapidez con la que la dinámica transitoria desaparece. |
SettlingTime | El primer tiempo T es tal que el error |y(t) – yfinal| ≤ SettlingTimeThreshold × |yfinal – yinit| para t ≥ T. De forma predeterminada, |
SettlingMin | Valor mínimo de y(t) una vez que ha subido la respuesta |
SettlingMax | Valor máximo de y(t) una vez que ha subido la respuesta |
Overshoot | Porcentaje de sobreimpulso. Relacionado con la respuesta normalizada ynorm(t) = (y(t) – yinit)/(yfinal – yinit), el sobreimpulso es el mayor de cero y 100 × max(ynorm(t) – 1). |
Undershoot | Porcentaje con subimpulso. Relacionado con la respuesta normalizada ynorm(t), el subimpulso es el menor de cero y –100 × min(ynorm(t) ). |
Peak | Valor pico de |y(t) – yinit| |
PeakTime | Tiempo en el que se produce el valor pico |
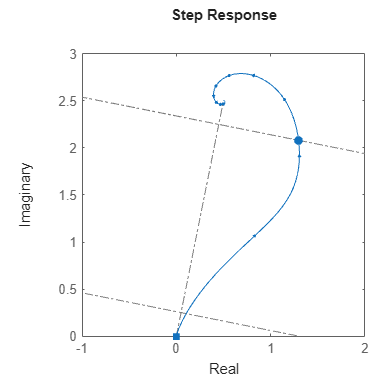
Para respuestas complejas, stepinfo calcula RiseTime, Overshoot y Undershoot a partir de la proyección de y(t) en la semirrecta que une yinit a yfinal. El resto de características de respuestas complejas tienen la misma definición que en la tabla anterior y se calculan sobre la base de las magnitudes de los valores complejos de y, yinit e yfinal. La siguiente figura muestra los puntos de tiempo de subida del 10% y del 90% proyectados en la semirrecta de yinit a yfinal. (desde R2025a)