tf
Modelo de función de transferencia
Descripción
Use tf para crear modelos de función de transferencia de valores reales o complejos, o bien para convertir modelos de sistemas dinámicos a la forma de función de transferencia.
Una función de transferencia es una representación en el dominio de la frecuencia de un sistema lineal invariante en el tiempo. Por ejemplo, considere un sistema dinámico SISO en tiempo continuo representado por la función de transferencia sys(s) = N(s)/D(s), donde s = jw, y N(s) y D(s) de denominan numerador y denominador polinomiales, respectivamente. El objeto de modelo tf puede representar funciones de transferencia SISO o MIMO en tiempo continuo o tiempo discreto.
Para crear un objeto de modelo de función de transferencia, puede especificar sus coeficientes directamente o convertir un modelo de otro tipo (por ejemplo, un modelo en espacio de estados ss) a la forma de función de transferencia. Para más información, consulte Funciones de transferencia.
También puede usar tf para crear modelos generalizados en espacio de estados (genss) o modelos en espacio de estados con incertidumbre (uss (Robust Control Toolbox)).
Creación
Sintaxis
Descripción
Crear un modelo de función de transferencia
sys = tf(numerator,denominator)Numerator y Denominator. Por ejemplo, considere un sistema dinámico SISO en tiempo continuo representado por la función de transferencia sys(s) = N(s)/D(s). En este caso, los argumentos de entrada numerator y denominator serán los coeficientes de N(s) y D(s), respectivamente.
sys = tf(numerator,denominator,ts)Numerator, Denominator y Ts. Por ejemplo, considere un sistema dinámico SISO en tiempo discreto representado por la función de transferencia sys(z) = N(z)/D(z). En este caso, los argumentos de entrada numerator y denominator serán los coeficientes de N(z) y D(z), respectivamente. Si no desea especificar el tiempo de muestreo, el argumento de entrada ts se debe establecer en -1.
sys = tf(numerator,denominator,ltiSys)ltiSys.
sys = tf(___,PropertyName=Value)
Convertir a un modelo de función de transferencia
sys = tf(ltiSys,Name=Value)ltiSys calculando ceros y polos en base a uno o más de los argumentos nombre-valor especificados. Dado que este método calcula ceros para cada par entrada-salida, es más adecuado para modelos con tamaños pequeños de entrada-salida. (desde R2025a)
Crear variable para expresión racional
s = tf('s') crea una variable especial s que puede usar en una expresión racional para crear un modelo de función de transferencia en tiempo continuo. A veces, usar una expresión racional es más fácil e intuitivo que especificar los coeficientes polinomiales.
Argumentos de entrada
Argumentos de par nombre-valor
Argumentos de salida
Propiedades
Funciones del objeto
Las siguientes listas contienen un subconjunto de las funciones que se pueden usar con los modelos del tipo tf. En general, cualquier función que se pueda aplicar a modelos de sistemas dinámicos se puede aplicar a un objeto del tipo tf.
Ejemplos
Para este ejemplo, considere el siguiente modelo de función de transferencia SISO:
Especifique los coeficientes del numerador y denominador ordenados en potencias decrecientes de s y cree el modelo de función de transferencia.
numerator = 1; denominator = [2,3,4]; sys = tf(numerator,denominator)
sys =
1
---------------
2 s^2 + 3 s + 4
Continuous-time transfer function.
Model Properties
Para este ejemplo, considere el siguiente modelo de función de transferencia SISO en tiempo discreto:
Especifique los coeficientes del numerador y denominador ordenados en potencias decrecientes de z y un tiempo de muestreo de 0,1 segundos. Cree el modelo de función de transferencia en tiempo discreto.
numerator = [2,0]; denominator = [4,0,3,-1]; ts = 0.1; sys = tf(numerator,denominator,ts)
sys =
2 z
---------------
4 z^3 + 3 z - 1
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
Para este ejemplo, considere un modelo de función de transferencia que represente un sistema de segundo orden con una frecuencia natural y un coeficiente de amortiguación conocidos.
La función de transferencia de un sistema de segundo orden, expresada en términos de su coeficiente de amortiguación y su frecuencia natural , está dada por:
Suponiendo un coeficiente de amortiguación = 0,25 y una frecuencia natural = 3 rad/s, cree la función de transferencia de segundo orden.
zeta = 0.25; w0 = 3; numerator = w0^2; denominator = [1,2*zeta*w0,w0^2]; sys = tf(numerator,denominator)
sys =
9
---------------
s^2 + 1.5 s + 9
Continuous-time transfer function.
Model Properties
Analice la respuesta de esta función de transferencia a una entrada de escalón.
stepplot(sys)

La gráfica muestra el ringdown esperado de un sistema de segundo orden con bajo coeficiente de amortiguación.
Cree una función de transferencia para el siguiente modelo en tiempo discreto con múltiples entradas y múltiples salidas:
con tiempo de muestreo de ts = 0.2 segundos.
Especifique los coeficientes del numerador como una matriz de 2 por 2.
numerators = {1 [1 0];[-1 2] 3};Especifique los coeficientes del denominador común como un vector fila.
denominator = [1 0.3];
Cree el modelo de función de transferencia MIMO en tiempo discreto.
ts = 0.2; sys = tf(numerators,denominator,ts)
sys =
From input 1 to output...
1
1: -------
z + 0.3
-z + 2
2: -------
z + 0.3
From input 2 to output...
z
1: -------
z + 0.3
3
2: -------
z + 0.3
Sample time: 0.2 seconds
Discrete-time transfer function.
Model Properties
Para más información sobre la creación de funciones de transferencia MIMO, consulte Funciones de transferencia MIMO.
Para este ejemplo, cree un modelo de función de transferencia MIMO a partir de la concatenación de modelos de función de transferencia SISO. Considere la siguiente función de transferencia de una entrada y dos salidas:
Especifique el modelo de función de transferencia MIMO a partir de la concatenación de las entradas SISO.
sys1 = tf([1 -1],[1 1]); sys2 = tf([1 2],[1 4 5]); sys = [sys1;sys2]
sys =
From input to output...
s - 1
1: -----
s + 1
s + 2
2: -------------
s^2 + 4 s + 5
Continuous-time transfer function.
Model Properties
Para más información sobre la creación de funciones de transferencia MIMO, consulte Funciones de transferencia MIMO.
Para este ejemplo, cree un modelo de función de transferencia en tiempo continuo usando expresiones racionales. A veces, usar una expresión racional es más simple e intuitivo que especificar los coeficientes polinomiales del numerador y del denominador.
Considere el siguiente sistema:
Para crear el modelo de función de transferencia, primero especifique s como un objeto tf.
s = tf('s')s = s Continuous-time transfer function. Model Properties
Cree el modelo de función de transferencia usando s en la expresión racional.
sys = s/(s^2 + 2*s + 10)
sys =
s
--------------
s^2 + 2 s + 10
Continuous-time transfer function.
Model Properties
Para este ejemplo, cree un modelo de función de transferencia en tiempo discreto usando una expresión racional. A veces, usar una expresión racional es más fácil e intuitivo que especificar los coeficientes polinomiales.
Considere el siguiente sistema:
Para crear el modelo de función de transferencia, primero especifique z como un objeto tf y el tiempo de muestreo Ts.
ts = 0.1;
z = tf('z',ts)z = z Sample time: 0.1 seconds Discrete-time transfer function. Model Properties
Cree el modelo de función de transferencia usando z en la expresión racional.
sys = (z - 1) / (z^2 - 1.85*z + 0.9)
sys =
z - 1
------------------
z^2 - 1.85 z + 0.9
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
Para este ejemplo, cree un modelo de función de transferencia con propiedades heredadas de otro modelo de función de transferencia. Considere las siguientes dos funciones de transferencia:
Para este ejemplo, cree un modelo sys1 con las propiedades TimeUnit y InputDelay definidas en 'minutes'.
numerator1 = [2,0]; denominator1 = [1,8,0]; sys1 = tf(numerator1,denominator1,'TimeUnit','minutes','InputUnit','minutes')
sys1 =
2 s
---------
s^2 + 8 s
Continuous-time transfer function.
Model Properties
propValues1 = [sys1.TimeUnit,sys1.InputUnit]
propValues1 = 1×2 cell
{'minutes'} {'minutes'}
Cree el segundo modelo de función de transferencia con propiedades heredadas de sys1.
numerator2 = [1,-1]; denominator2 = [7,2,0,0,9]; sys2 = tf(numerator2,denominator2,sys1)
sys2 =
s - 1
-----------------
7 s^4 + 2 s^3 + 9
Continuous-time transfer function.
Model Properties
propValues2 = [sys2.TimeUnit,sys2.InputUnit]
propValues2 = 1×2 cell
{'minutes'} {'minutes'}
Observe que el modelo de función de transferencia sys2 tiene las mismas propiedades que sys1.
Puede usar un bucle for para especificar un arreglo de modelos de función de transferencia.
En primer lugar, predefina el arreglo de funciones de transferencia con ceros.
sys = tf(zeros(1,1,3));
Los primeros dos índices representan el número de salidas y entradas de los modelos, en tanto que el tercer índice representa el número de modelos en el arreglo.
Cree el arreglo de modelo de función de transferencia usando una expresión racional en el bucle for.
s = tf('s'); for k = 1:3 sys(:,:,k) = k/(s^2+s+k); end sys
sys(:,:,1,1) =
1
-----------
s^2 + s + 1
sys(:,:,2,1) =
2
-----------
s^2 + s + 2
sys(:,:,3,1) =
3
-----------
s^2 + s + 3
3x1 array of continuous-time transfer functions.
Model Properties
Para este ejemplo, calcule la función de transferencia del siguiente modelo en espacio de estados:
Cree el modelo en espacio de estados usando las matrices de espacio de estados.
A = [-2 -1;1 -2]; B = [1 1;2 -1]; C = [1 0]; D = [0 1]; ltiSys = ss(A,B,C,D);
Convierta el modelo en espacio de estados ltiSys en una función de transferencia.
sys = tf(ltiSys)
sys =
From input 1 to output:
s
-------------
s^2 + 4 s + 5
From input 2 to output:
s^2 + 5 s + 8
-------------
s^2 + 4 s + 5
Continuous-time transfer function.
Model Properties
Para este ejemplo, extraiga los componentes medidos y de ruido de un modelo polinomial identificado en dos funciones de transferencia independientes.
Cargue el modelo polinomial Box-Jenkins ltiSys en identifiedModel.mat.
load('identifiedModel.mat','ltiSys');
ltiSys es un modelo identificado en tiempo discreto con el formato: , donde representa el componente medido y , el componente de ruido.
Extraiga el componente medido y el componente de ruido como funciones de transferencia.
sysMeas = tf(ltiSys,'measured') sysMeas =
From input "u1" to output "y1":
-0.1426 z^-1 + 0.1958 z^-2
z^(-2) * ----------------------------
1 - 1.575 z^-1 + 0.6115 z^-2
Sample time: 0.04 seconds
Discrete-time transfer function.
Model Properties
sysNoise = tf(ltiSys,'noise')sysNoise =
From input "v@y1" to output "y1":
0.04556 + 0.03301 z^-1
----------------------------------------
1 - 1.026 z^-1 + 0.26 z^-2 - 0.1949 z^-3
Input groups:
Name Channels
Noise 1
Sample time: 0.04 seconds
Discrete-time transfer function.
Model Properties
El componente medido puede servir como modelo de planta, mientras que el componente de ruido puede usarse como modelo de perturbaciones para el diseño de un sistema de control.
Los objetos de modelos de función de transferencia incluyen datos sobre el modelo que ayudan a recordar qué representa el modelo. Por ejemplo, se pueden asignar nombres a las entradas y salidas del modelo.
Considere el siguiente modelo de función de transferencia MIMO en tiempo continuo:
El modelo tiene una entrada, Current, y dos salidas, Torque y Angular velocity.
En primer lugar, especifique los coeficientes del numerador y denominador del modelo.
numerators = {[1 1] ; 1};
denominators = {[1 2 2] ; [1 0]};Cree el modelo de función de transferencia especificando el nombre de la entrada y los nombres de las salidas.
sys = tf(numerators,denominators,'InputName','Current',... 'OutputName',{'Torque' 'Angular Velocity'})
sys =
From input "Current" to output...
s + 1
Torque: -------------
s^2 + 2 s + 2
1
Angular Velocity: -
s
Continuous-time transfer function.
Model Properties
Para este ejemplo, especifique el orden de los polinomios en modelos de función de transferencia en tiempo discreto mediante la propiedad 'Variable'.
Considere las siguientes funciones de transferencia en tiempo discreto con un tiempo de muestreo de 0,1 segundos:
Cree la primera función de transferencia en tiempo discreto especificando los coeficientes de z.
numerator = [1,0,0]; denominator = [1,2,3]; ts = 0.1; sys1 = tf(numerator,denominator,ts)
sys1 =
z^2
-------------
z^2 + 2 z + 3
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
Los coeficientes de sys1 están ordenados en potencias decrecientes de z.
tf cambia la convención en función del valor de la propiedad 'Variable'. Dado que sys2 es el modelo de función de transferencia inverso de sys1, especifique 'z^-1' como 'Variable' y use los mismos coeficientes del numerador y denominador.
sys2 = tf(numerator,denominator,ts,'Variable','z^-1')
sys2 =
1
-------------------
1 + 2 z^-1 + 3 z^-2
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
Ahora, los coeficientes de sys2 están ordenados en potencias crecientes de z^-1.
Basándose en las diferentes convenciones, puede especificar el orden de los polinomios en los modelos de función de transferencia mediante la propiedad 'Variable'.
En este ejemplo, deberá crear un filtro paso bajo con un parámetro ajustable a:
Dado que los coeficientes del numerador y denominador de un bloque tunableTF son independientes, no puede usar tunableTF para representar F. En su lugar, genere F con el objeto de parámetro real ajustable realp.
Cree un parámetro real ajustable con un valor inicial de 10.
a = realp('a',10)a =
Name: 'a'
Value: 10
Minimum: -Inf
Maximum: Inf
Free: 1
Real scalar parameter.
Use tf para crear el filtro paso bajo ajustable F.
numerator = a; denominator = [1,a]; F = tf(numerator,denominator)
Generalized continuous-time state-space model with 1 outputs, 1 inputs, 1 states, and the following blocks: a: Scalar parameter, 2 occurrences. Model Properties Type "ss(F)" to see the current value and "F.Blocks" to interact with the blocks.
F es un objeto de tipo genss que tiene el parámetro ajustable a en su propiedad Blocks. Se puede conectar F con otros modelos ajustables o numéricos para crear modelos de sistemas de control más complejos. Para ver un ejemplo, consulte Sistema de control con componentes ajustables.
En este ejemplo, creará un modelo de función de transferencia MIMO de ganancia estática.
Considere la siguiente matriz de ganancia estática de dos entradas y dos salidas, m:
Especifique la matriz de ganancia y cree el modelo de función de transferencia de ganancia estática.
m = [2,4;...
3,5];
sys1 = tf(m)sys1 = From input 1 to output... 1: 2 2: 3 From input 2 to output... 1: 4 2: 5 Static gain. Model Properties
Puede usar el modelo de función de transferencia de ganancia estática sys1 obtenido arriba y ponerlo en cascada con otro modelo de función de transferencia.
Para hacerlo, cree otro modelo de función de transferencia discreta de dos entradas y dos salidas y use la función series para conectar ambos modelos.
numerators = {1,[1,0];[-1,2],3};
denominator = [1,0.3];
ts = 0.2;
sys2 = tf(numerators,denominator,ts)sys2 =
From input 1 to output...
1
1: -------
z + 0.3
-z + 2
2: -------
z + 0.3
From input 2 to output...
z
1: -------
z + 0.3
3
2: -------
z + 0.3
Sample time: 0.2 seconds
Discrete-time transfer function.
Model Properties
sys = series(sys1,sys2)
sys =
From input 1 to output...
3 z^2 + 2.9 z + 0.6
1: -------------------
z^2 + 0.6 z + 0.09
-2 z^2 + 12.4 z + 3.9
2: ---------------------
z^2 + 0.6 z + 0.09
From input 2 to output...
5 z^2 + 5.5 z + 1.2
1: -------------------
z^2 + 0.6 z + 0.09
-4 z^2 + 21.8 z + 6.9
2: ---------------------
z^2 + 0.6 z + 0.09
Sample time: 0.2 seconds
Discrete-time transfer function.
Model Properties
Desde R2025a
Este ejemplo muestra cómo obtener un modelo de función de transferencia truncada de un modelo en espacio de estados disperso. Este ejemplo utiliza un modelo disperso obtenido linealizando un modelo térmico de distribución de calor en una varilla cilíndrica circular.
Cargue los datos del modelo.
load cylindricalRod.mat
sys = sparss(A,B,C,D,E);
w = logspace(-7,-1,20);
size(sys)Sparse state-space model with 3 outputs, 1 inputs, and 7522 states.
Analice la respuesta en frecuencia del modelo.
sigmaplot(sys,w)

Para obtener una aproximación truncada, utilice tf y especifique la banda de frecuencia de enfoque. Para este modelo, puede usar un rango de frecuencia de 0 rad/s a 0,01 rad/s para obtener la aproximación de orden inferior.
tsys = tf(sys,Focus=[0 1e-2],Display="off");Compare la respuesta en frecuencia.
sigmaplot(sys,tsys,w)
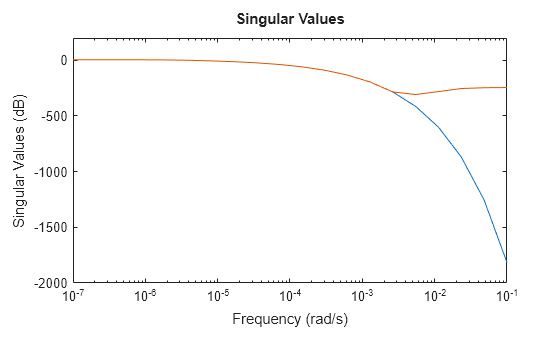
Este modelo térmico tiene una atenuación muy pronunciada más allá de 0,001 rad/s. De forma predeterminada, el modelo reducido obtenido usando tf no proporciona una buena coincidencia para esta atenuación. Para mitigarlo, puede utilizar el argumento RollOff de tf y especificar un valor de atenuación mínimo más allá de la banda de frecuencia de enfoque. Especifique un valor de pendiente de atenuación de -45, que corresponde a una tasa de al menos –900 db/década.
tsys2 = tf(sys,Focus=[0 1e-2],RollOff=-45,Display="off");
sigmaplot(sys,tsys2,w)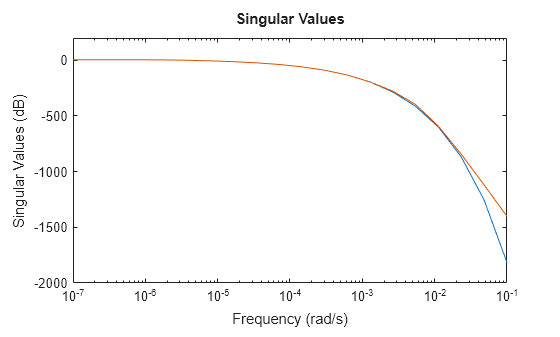
El modelo reducido ahora proporciona una aproximación mucho mejor del valor de atenuación. Sin embargo, en este ejemplo, reajustar la pendiente de atenuación usando tf requiere volver a calcular ceros y polos. Esto puede demandar una alta carga computacional en caso de modelos a gran escala. Como alternativa, puede utilizar el método de truncamiento de polos y ceros de reducespec y ajustar la atenuación sin coste de cálculo adicional, después de que el software haya calculado los polos y ceros. Para ver un ejemplo, consulte Zero-Pole Truncation of Thermal Model.
Limitaciones
Los modelos de función de transferencia son poco adecuados para el cálculo numérico. Una vez creados, conviértalos a representaciones en espacio de estados antes de combinarlos con otros modelos o realizar transformaciones de modelos. Luego, puede convertir los modelos resultantes nuevamente en funciones de transferencia para revisarlos.
Un modelo no lineal identificado no puede convertirse directamente en un modelo de función de transferencia mediante la función
tf. Para obtener un modelo de función de transferencia:Convierta el modelo no lineal identificado en un modelo LTI identificado con las funciones
linapp(System Identification Toolbox),idnlarx/linearize(System Identification Toolbox) oidnlhw/linearize(System Identification Toolbox).Luego, convierta el modelo resultante en un modelo de función de transferencia mediante la función
tf.
Algoritmos
Para convertir modelos dispersos, tf utiliza el algoritmo Krylov--Schur [1] para que las iteraciones de potencia inversa calculen polos y ceros en la banda de frecuencia especificada.
Referencias
[1] Stewart, G. W. “A Krylov--Schur Algorithm for Large Eigenproblems.” SIAM Journal on Matrix Analysis and Applications 23, no. 3 (January 2002): 601–14. https://doi.org/10.1137/S0895479800371529.