correct
Sintaxis
Descripción
[ corrige el estado y su covarianza de estado asociada en función de associations,newLandmark] = correct(slamObj,measurement,measurementCovariance)measurement y measurementCovariance en el paso de tiempo actual. correct utiliza la función de asociación de datos especificada en la propiedad DataAssociationFcn del objeto ekfSLAM, slamObj, para asociar la medición a puntos de referencia y extraer nuevos puntos de referencia de la medición.
La función correct utiliza estas asociaciones para corregir el estado y la covarianza del estado asociado, y luego aumenta el estado con nuevos puntos de referencia.
[ pasa todos los argumentos adicionales especificados en associations,newLandmark] = correct(slamObj,measurement,measurementCovariance,varargin)varargin a la propiedad subyacente DataAssociationFcn de slamObj.
Las primeras cuatro entradas a la propiedad DataAssociationFcn son la posición del punto de referencia, la covarianza de la posición del punto de referencia, la medición y la covarianza de la medición, seguidas de todos los argumentos en varargin.
Ejemplos
Cargue un conjunto de datos de pista de carreras que contenga el estado inicial del vehículo, la covarianza del estado inicial del vehículo, la covarianza del ruido del proceso, la entrada de control, el tamaño del paso de tiempo, la medición, la covarianza de la medición y los valores de la puerta de validación.
load("racetrackDataset.mat","initialState","initialStateCovariance", ... "processNoise","controllerInputs","timeStep", ... "measurements","measCovar","validationGate");
Cree un objeto ekfSLAM con estado inicial, covarianza de estado inicial y ruido de proceso.
ekfSlamObj = ekfSLAM("State",initialState, ... "StateCovariance",initialStateCovariance, ... "ProcessNoise",processNoise);
Inicializa una variable para almacenar la pose.
storedPose = nan(size(controllerInputs,1)+1,3); storedPose(1,:) = ekfSlamObj.State(1:3);
Prediga el estado utilizando la entrada de control y el tamaño del paso de tiempo para la función de transición de estado. Luego, corrija el estado utilizando los datos de los puntos de referencia observados, la covarianza de medición y la puerta de validación para la función de asociación de datos.
for count = 1:size(controllerInputs,1) % Predict the state predict(ekfSlamObj,controllerInputs(count,:),timeStep); % Get the landmarks in the environment observedLandmarks = measurements{count}; % Correct the state if ~isempty(observedLandmarks) correct(ekfSlamObj,observedLandmarks, ... measCovar,validationGate); end % Log the estimated pose storedPose(count+1,:) = ekfSlamObj.State(1:3); end
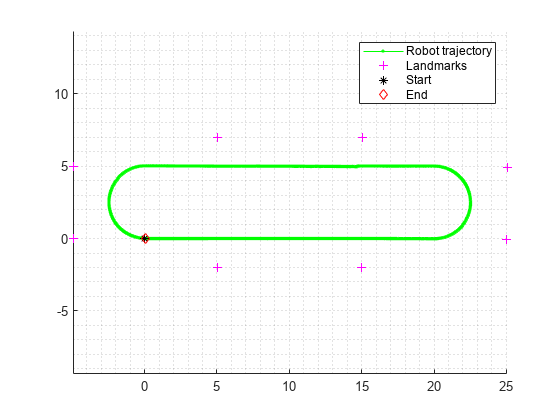
Visualice el mapa creado.
fig = figure; figAx = axes(fig); axis equal grid minor hold on plot(figAx,storedPose(:,1),storedPose(:,2),"g.-") landmarks = reshape(ekfSlamObj.State(4:end),2,[])'; plot(figAx,landmarks(:,1),landmarks(:,2),"m+") plot(figAx,storedPose(1,1),storedPose(1,2),"k*") plot(figAx,storedPose(end,1),storedPose(end,2),"rd") legend("Robot trajectory","Landmarks","Start","End")
Argumentos de entrada
Argumentos de salida
Capacidades ampliadas
Historial de versiones
Introducido en R2021b